Izračun in izbor (ruska metodologija) - polžasti menjalnik. Dejanska izhodna hitrost Izračun zaprtega zobniškega sklopa
Primer 1
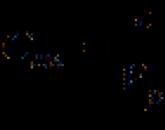
Določite prestavno razmerje zobniškega sklopa (slika 19), število vrtljajev gnane gredi in skupni koeficient zmogljivosti (učinkovitost), če je število zob koles enako: z 1 =30, z 2 =20, z 3 =45, z 4 =30, z 5 =20, z 6 =120, z 7 =25, z 8 =15 ; število vrtljajev vhodne gredi n 1 = 1600 vrt./min.
Rešitev
Mehanizem je sestavljen iz štirih stopenj: dveh cilindričnih z 1 - z 2 , z 3 - z 4 z zunanjim zobnikom, cilindrični z 5 - z 6 z notranjim zobnikom in stožčastim z 7 - z 8 .
Skupno prestavno razmerje večstopenjskega menjalnika je enako zmnožku prestavnih razmerij vsake stopnje, ki tvorijo ta prestavni mehanizem. Za ta primer
 .
.
Znak (-) označuje, da je smer vrtenja koles v teh parih nasprotna. Smer vrtenja koles v tem primeru lahko določimo tudi s postavitvijo puščic na diagram (slika 19).
Število vrtljajev gnane gredi se določi preko prestavnega razmerja  vrt./min
vrt./min
Celotna učinkovitost prestavnega mehanizma je enaka
kjer so številčne vrednosti vzete glede na pogoj problema T1.
Primer 2
tukaj  ,
, ,
, - prestavna razmerja pretvorjenega mehanizma (nosilec H ustavljeno in fiksno kolo se vrti z 3
). Nastalo prestavno razmerje z znakom "+" označuje sovpadanje smeri vrtenja pogonske in gnane gredi.
- prestavna razmerja pretvorjenega mehanizma (nosilec H ustavljeno in fiksno kolo se vrti z 3
). Nastalo prestavno razmerje z znakom "+" označuje sovpadanje smeri vrtenja pogonske in gnane gredi.
Primer 3
Rešitev
Kot v primeru 2, se ta mehanizem nanaša na enostopenjski planetni zobnik in prestavno razmerje iz nosilca H na kolo z 1 je določena z relacijo
Primer 4
Rešitev
Kompleksni zobniški sklop je sestavljen iz dveh stopenj: prva stopnja je preprost cilindrični par z zunanjim zobnikom z 1 -z 2, druga stopnja je planetni zobnik N-z 5 , ki prenaša rotacijsko gibanje z nosilca H na kolo z 5 preko satelita z 4 . Smer vrtenja izhodne gredi je določena z algebraičnim predznakom.
1. Pri dvostopenjskem menjalniku se skupno prestavno razmerje najde prek prestavnih razmerij vsake stopnje, t.j.
 .
.
Prejeto prestavno razmerje  , kar označuje povečanje frekvence vrtenja izhodne gredi, znak “+” pa označuje, da sta smeri vrtenja gredi enaki.
, kar označuje povečanje frekvence vrtenja izhodne gredi, znak “+” pa označuje, da sta smeri vrtenja gredi enaki.
2. Določite kotno hitrost izhodne povezave  in njegov kotni pospešek
in njegov kotni pospešek 
 rad/s,
rad/s,
 rad/s 2 .
rad/s 2 .
3. Ker je vrtenje koles pospešeno (sprejemamo enakomerno pospešeno), potem čas, v katerem se bodo kotne hitrosti podvojile, določimo iz odvisnosti
 ,
,
kje  in
in  - kotne hitrosti na začetku in na koncu obravnavanega časovnega obdobja
- kotne hitrosti na začetku in na koncu obravnavanega časovnega obdobja  . Od tod
. Od tod
 Z.
Z.
4. Določite splošno učinkovitost prenosa
Naloga T2
Izhodna povezava mehanizma, prikazanega na diagramih (sl. 23–32), izvaja povratno (ali povratno) gibanje in je obremenjena na delovni hod s konstantno silo F c
(ali trenutek T Z) uporabna odpornost. V prostem teku z obratno smerjo gibanja izhodne povezave ni koristnega upora, škodljivi pa še naprej delujejo. Upoštevanje učinka trenja v kinematičnih parih, v smislu učinkovitosti  mehanizem, ki ga je treba določiti.
mehanizem, ki ga je treba določiti.
1) trenutek vožnje T d , konstantne velikosti, ki jo je treba uporabiti za vhodno povezavo v enakomernem gibanju s ciklom, ki ga sestavljajo delovni in prosti teki;
2) delo sil trenja pri delovnem in prostem teku, glede na to, da je škodljivi upor pri vsakem od hodov konstanten, pri delovnem hodu pa je trikrat večji kot v prostem teku;
3) sprememba kinetične energije mehanizma med delovnim hodom in med prostim tekom;
4) moč, ki jo potrebuje pogon, ko se vhodna povezava vrti s povprečno hitrostjo  in povprečno (za celo revolucijo) moč uporabnih sil upora in trenja.
in povprečno (za celo revolucijo) moč uporabnih sil upora in trenja.
Rešitev tega problema temelji na enačbi gibanja mehanizma, ki vzpostavlja razmerje med spremembo kinetične energije in delom sil (zakon kinetične energije). Delo sil in momentov je določeno z linearnimi ali kotnimi premiki členov, na katere delujejo. V zvezi s tem je potrebno določiti položaje mehanizma na skrajnih položajih izhodne povezave. Premike povezav, linearne in kotne, je mogoče določiti iz risbe, izdelane v merilu, ali izračunati analitično. Dimenzije povezav, glede na njihove oznake na diagramu mehanizma, in druge potrebne vrednosti so podane v tabelah številčnih podatkov, kjer  je faktor učinkovitosti, pri možnosti 9 m- modul letve in zobnika, z
- število zob kolesa.
je faktor učinkovitosti, pri možnosti 9 m- modul letve in zobnika, z
- število zob kolesa.
Tabela 17
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
OA, mm | ||||||||||
|
OS, mm | ||||||||||
|
sonce, mm | ||||||||||
|
AB, mm | ||||||||||
|
T Z , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 18
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
oa, mm | ||||||||||
|
AB, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 19
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
OA, mm | ||||||||||
|
OV, mm | ||||||||||
|
T Z , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 20
|
vrednost |
Predzadnja številka šifre |
|||||||||||||||||||||
|
oa, mm | ||||||||||||||||||||||
|
OV, mm | ||||||||||||||||||||||
|
BC=BD, mm | ||||||||||||||||||||||
|
F c , H | ||||||||||||||||||||||
|
| ||||||||||||||||||||||
|
| ||||||||||||||||||||||

 , rad/s
, rad/sTabela 21
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
R, mm | ||||||||||
|
oa, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 22
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
OA, mm | ||||||||||
|
OV, mm | ||||||||||
|
BD, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
rad/s
,
rad/sTabela 23
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
OA, mm | ||||||||||
|
e, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 24
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
R, mm | ||||||||||
|
oa, mm | ||||||||||
|
r, mm | ||||||||||
|
| ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 25
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
oa, mm | ||||||||||
|
AB, mm | ||||||||||
|
m, mm | ||||||||||
|
| ||||||||||
|
T z, Nm | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 26
|
vrednost |
Predzadnja številka šifre |
|||||||||
|
oa, mm | ||||||||||
|
OV, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sZaporedje naloge. Najprej je treba zgraditi mehanizem v skrajnih položajih in v danih smereh kotne hitrosti vhodne povezave  in stalno moč F Z
(ali trenutek T Z) uporabna odpornost na nastavljene delovne in prosti tek.
in stalno moč F Z
(ali trenutek T Z) uporabna odpornost na nastavljene delovne in prosti tek.
Pri grafičnem določanju linearnih in kotnih premikov povezav je treba iz risbe odstraniti:
1) za vhodno povezavo njeni rotacijski koti na delovnem hodu  in v prostem teku
in v prostem teku  X;
X;
2) za izhodni člen med njegovim povratnim gibanjem, linearni premik, t.j. premakniti s,
ali med njegovim povratno rotacijskim gibanjem nihalni kot  .
.
Za določitev con delovnih in prostih gibov za vhodni člen je treba upoštevati povezavo gibanja s prikazano smerjo delovanja uporabnega upora, ki naj prepreči premik izhodnega člena med delovnim hodom. .
Pri možnostih 5 in 8 so členi v zgornjem paru pozitivno zaklenjeni, kar preprečuje, da bi se členi odmaknili drug od drugega: pri možnosti 8 je valj polmera r zvitki v krožnem utoru vhodnega členka, ki ga pokrivata zunanji in notranji profili utora, pri možnosti 5 je okrogli ekscentrik pokrit z okvirjem izhodnega člena.
UVOD
Polžasto orodje se nanaša na zobnike s sekajočimi se gredi.
Glavne prednosti polžastih zobnikov: možnost pridobitve velikih prestavnih razmerij v enem paru, gladko vpetje, možnost samozaviranja. Slabosti: sorazmerno nizka učinkovitost, povečana obraba in nagnjenost k zaseganju, potreba po uporabi dragih materialov proti trenju za kolesa.
Polžasti zobniki so dražji in bolj zapleteni od zobnikov, zato se praviloma uporabljajo, kadar je treba prenesti gibanje med sekajočimi se gredi, pa tudi tam, kjer je potrebno veliko prestavno razmerje.
Kriterij za delovanje polžastih zobnikov je površinska trdnost zob, ki zagotavlja njihovo odpornost proti obrabi in odsotnost lomljenja in zagrajevanja ter upogibno trdnost. Pod delovanjem kratkotrajnih preobremenitev v polžastem zobniku se zobje polžastega kolesa preverijo glede upogiba glede na največjo obremenitev.
Za telo črva se izvede verifikacijski izračun togosti in tudi toplotni izračun.
Projektiranje poteka v dveh fazah: projektiranje - iz pogojev kontaktne vzdržljivosti se določijo glavne dimenzije prenosa in preverjanje - z znanimi parametri prenosa v pogojih njegovega delovanja se določijo in primerjajo kontaktne in upogibne napetosti. s tistimi, ki jih dovoljuje vzdržljivost materiala.
Določene so sile, ki obremenjujejo ležaje, ležaji pa so izbrani glede na njihovo nosilnost.
KINEMATSKI IZRAČUN IN SILE
Izbira motorja
Za izbiro elektromotorja se določi njegova zahtevana moč in hitrost.
Po začetnih projektnih podatkih je potrebno moč za izvedbo tehnološkega procesa najti iz formule:
P izhod \u003d F t V, (2.1)
kjer je P izhod - moč na izhodni gredi pogona, W;
F t - vlečna sila, N;
V je hitrost gibanja delovnega telesa, m/s;
P izhod \u003d 1,5 kW.
Določitev splošne učinkovitosti voziti
Nato v skladu s kinematično verigo prenosa moči skupni izkoristek. celotnega pogona se izračuna po formuli:
s skupaj = s 1 s 2 s 3 s 4 (2.2)
h skupaj = 0,80,950,980,99 = 0,74.
Tako na podlagi splošne učinkovitosti. postalo je jasno, da bo med delovanjem pogona le 74 % moči iz motorja šlo v boben vitla.
Določimo potrebno moč motorja za normalno delovanje vitla:
Sprejemamo motor 2,2 kW.
Izračun vrtilne hitrosti gredi motorja
Ker na tej stopnji prestavna razmerja pogonskih zobnikov še niso znana in hitrost gredi motorja ni znana, je mogoče izračunati želeno hitrost gredi motorja.
Za to so bili opravljeni naslednji izračuni.
Določanje hitrosti izhodne gredi pogona
Po začetnih podatkih se kotna hitrost izhodne gredi izračuna po formuli:
kjer je u - kotna hitrost, s -1;
D b - premer bobna, m;
v je hitrost gibanja delovnega telesa, m/s.
Poiščimo frekvenco vrtenja, pri čemer poznamo kotno hitrost po formuli:
vrt./min (2,5)
Določanje želenega pogonskega razmerja
Iz analize kinematičnega diagrama pogona električnega vitla je razvidno, da njegovo skupno prestavno razmerje (u total) nastane zaradi prestavnega razmerja polžastega reduktorja.
Sprejmemo u chp = 50. Razmerje med frekvencama vrtenja gredi motorja n dv in izhodne gredi n z je določeno z razmerjem:
n dv = n z u skupaj, (2.6)
potem bo želena hitrost gredi motorja:
n motor = 38,250 = 1910 vrt./min.
Glede na trenutno ponudbo motorjev je najbližji želeni hitrosti motor s sinhrono hitrostjo 1500 vrt/min. Glede na zgoraj navedeno končno sprejemamo motor znamke: 90L4 / 1395. serija AIR, ki ima naslednje značilnosti:
R dv \u003d 2,2 kW;
n motor = 1500 vrt./min.
Kinematični izračuni
Skupno prestavno razmerje:
u skupaj \u003d n dv / \u003d 1500 / 38,2 \u003d 39,3.
Določimo vse kinematične značilnosti zasnovanega pogona, ki bodo v prihodnosti potrebne za podrobno študijo menjalnika. Določanje frekvence in hitrosti vrtenja. Hitrosti vrtenja vseh gredi je enostavno izračunati, začenši z izbrano vrtilno hitrostjo gredi elektromotorja, ob upoštevanju dejstva, da se vrtilna hitrost vsake naslednje gredi določi prek vrtilne hitrosti prejšnje po formulo (2.7), ob upoštevanju prestavnega razmerja:
kjer je n (i+1) - število vrtljajev i+1 gredi, vrt/min;
u i -(i+1) - prestavno razmerje med gredi i in i+1.
Trenutki na gredi menjalnika:
T 1 = 9,5510 3 (P / n e) \u003d 9,5510 3 (2,2 / 1500) = 14,0 Nm
T 2 \u003d T 1 u \u003d 14.039.3 = 550 Nm.
Polžasti menjalnik je eden od razredov mehanskih menjalnikov. Menjalniki so razvrščeni glede na vrsto mehanskega prenosa. Vijak, ki leži pod polžastim zobnikom, je videti kot polž, od tod tudi ime.
Motor z gonili- to je enota, sestavljena iz menjalnika in elektromotorja, ki sta v eni enoti. Polžasti motorustvaril za delo kot elektromehanski motor v različnih strojih splošnega namena. Omeniti velja, da ta vrsta opreme odlično deluje tako pri stalnih kot pri spremenljivih obremenitvah.
V polžastem menjalniku do povečanja navora in zmanjšanja kotne hitrosti izhodne gredi pride zaradi pretvorbe energije, ki jo vsebujeta visoka kotna hitrost in nizek navor na vhodni gredi.
Napake pri izračunu in izbiri menjalnika lahko povzročijo njegovo prezgodnjo okvaro in posledično v najboljšem primeru  do finančne izgube.
do finančne izgube.
Zato je treba delo pri izračunu in izbiri menjalnika zaupati izkušenim strokovnjakom za projektiranje, ki bodo upoštevali vse dejavnike od lokacije menjalnika v prostoru in pogojev delovanja do njegove temperature ogrevanja med delovanjem. Po potrditvi z ustreznimi izračuni bo strokovnjak poskrbel za izbiro optimalnega menjalnika za vaš specifični pogon.
Praksa kaže, da pravilno izbran menjalnik zagotavlja življenjsko dobo najmanj 7 let za polžaste menjalnike in 10-15 let za cilindrične menjalnike.
Izbira katerega koli menjalnika poteka v treh fazah:
1. Izbira vrste menjalnika
2. Izbira celotne velikosti (velikosti) reduktorja in njegovih značilnosti.
3. Preverjanje izračunov
1. Izbira vrste menjalnika
1.1 Začetni podatki:
Kinematični diagram pogona, ki označuje vse mehanizme, povezane z menjalnikom, njihovo prostorsko razporeditev drug glede na drugega, ki označuje pritrdilne točke in načine montaže menjalnika.
1.2 Določanje položaja osi gredi menjalnika v prostoru.
Vijačni menjalniki:
Os vhodne in izhodne gredi menjalnika sta med seboj vzporedni in ležita le v eni vodoravni ravnini - vodoravnem čelnem menjalniku.
Os vhodne in izhodne gredi menjalnika sta med seboj vzporedni in ležita le v eni navpični ravnini - navpičnem čelnem menjalniku.
Os vhodne in izhodne gredi menjalnika je lahko v poljubnem prostorskem položaju, medtem ko te osi ležita na isti ravni črti (sovpadata) - koaksialni cilindrični ali planetarni menjalnik.
Stožčasti menjalniki:
Os vhodne in izhodne gredi menjalnika sta pravokotni drug na drugega in ležita le v eni vodoravni ravnini.
Polžasti zobniki:
Os vhodne in izhodne gredi menjalnika je lahko v poljubnem prostorskem položaju, medtem ko se med seboj križata pod kotom 90 stopinj in ne ležita v isti ravnini - enostopenjski polžasti menjalnik.
Os vhodne in izhodne gredi menjalnika je lahko v poljubnem prostorskem položaju, medtem ko sta med seboj vzporedna in ne ležita v isti ravnini, ali pa se križata pod kotom 90 stopinj drug proti drugemu in ne ležita v isti ravnini - dvostopenjski menjalnik.
1.3 Določitev načina vgradnje, položaja vgradnje in možnosti montaže menjalnika. 
Način pritrjevanja menjalnika in položaj vgradnje (montaža na podlago ali na gnano gred pogonskega mehanizma) se določita glede na tehnične karakteristike, podane v katalogu za vsak menjalnik posebej.
Možnost montaže je določena v skladu s shemami, navedenimi v katalogu. Sheme "Možnosti montaže" so podane v razdelku "Označevanje menjalnikov".
1.4 Poleg tega je pri izbiri tipa menjalnika mogoče upoštevati naslednje dejavnike
1) Raven hrupa
- najnižja - za polžaste prestave
- najvišja - za cilindrične in stožčaste zobnike
2) Učinkovitost
- najvišji - za planetarne in enostopenjske čelne menjalnike
- najnižja - pri črvu, zlasti dvostopenjskem
Polžaste prestave se prednostno uporabljajo pri občasnem delovanju
3) Poraba materiala za enake vrednosti navora na gredi z nizko hitrostjo
- najnižja - za planetarne enostopenjske
4) Mere z enakimi prestavnimi razmerji in navori:
- največji aksialni - v koaksialni in planetarni
- največji v smeri, pravokotni na osi - za cilindrične
- najmanjši radialni - do planetarnega.
5) Relativni stroški rublja/(Nm) za enake središčne razdalje:
- najvišji - v stožčasti
- najnižja - v planetarni
2. Izbira celotne velikosti (velikosti) reduktorja in njegovih značilnosti
2.1. Začetni podatki
Kinematični diagram pogona, ki vsebuje naslednje podatke:
- vrsta pogonskega stroja (motor);
- zahtevani navor na izhodni gredi T zahtevani, Nxm, ali zahtevana moč pogonskega sistema P, kW;
- frekvenca vrtenja vhodne gredi menjalnika n in, vrt/min;
- frekvenca vrtenja izhodne gredi menjalnika n ven, vrt/min;
- narava obremenitve (enakomerna ali neenakomerna, reverzibilna ali nepovratna, prisotnost in obseg preobremenitev, prisotnost udarcev, udarcev, vibracij);
- zahtevano trajanje delovanja menjalnika v urah;
- povprečno dnevno delo v urah;
- število zagonov na uro;
- trajanje vključkov z obremenitvijo, PV%;
- okoljski pogoji (temperatura, pogoji odvajanja toplote);
- trajanje vključkov pod obremenitvijo;
- radialna konzolna obremenitev na sredini pristajalnega dela koncev izhodne gredi F ven in vhodne gredi F not;
2.2. Pri izbiri velikosti menjalnika se izračunajo naslednji parametri:
1) Prestavno razmerje
U= n vhod / n izhod (1)
Najbolj ekonomično je delovanje menjalnika pri vhodnih vrtljajih manj kot 1500 vrt/min, za daljše nemoteno delovanje menjalnika pa je priporočljiva uporaba vrtljajev vhodne gredi manj kot 900 vrt/min.
Prestavno razmerje se zaokroži na najbližje število v skladu s tabelo 1.
V tabeli so izbrani tipi menjalnikov, ki ustrezajo danemu prestavnemu razmerju.
2) Izračunan navor na izhodni gredi menjalnika
T izračun \u003d T zahtevano x K dir, (2)
Zahtevan T - zahtevani navor na izhodni gredi, Nxm (začetni podatki ali formula 3)
K dir - koeficient načina delovanja
Z znano močjo pogonskega sistema:
Zahtevan T \u003d (P zahteva x U x 9550 x učinkovitost) / n in, (3)
Zahtevan P - moč pogonskega sistema, kW
n in - frekvenca vrtenja vhodne gredi menjalnika (pod pogojem, da gred pogonskega sistema neposredno prenaša vrtenje na vhodno gred menjalnika brez dodatne prestave), vrt./min.
U - prestavno razmerje menjalnika, formula 1
Učinkovitost - učinkovitost menjalnika
Koeficient načina delovanja je opredeljen kot produkt koeficientov: 
Za prestavne reduktorje:
K dir \u003d K 1 x K 2 x K 3 x K PV x K roar (4)
Za polžaste prestave:
K dir \u003d K 1 x K 2 x K 3 x K PV x K rev x K h (5)
K 1 - koeficient vrste in značilnosti pogonskega sistema, tabela 2
K 2 - koeficient trajanja delovne mize 3
K 3 - koeficient števila startov tabela 4
K PV - koeficient trajanja vključkov tabela 5
K rev - koeficient reverzibilnosti, pri nereverzibilnem delovanju K rev = 1,0 pri obratovanju v obratni smeri K rev = 0,75
K h - koeficient, ki upošteva lokacijo para črvov v prostoru. Ko se polž nahaja pod kolesom, K h = 1,0, ko se nahaja nad kolesom, K h = 1,2. Ko se črv nahaja na strani kolesa, je K h = 1.1.
3) Izračunana radialna konzolna obremenitev na izhodni gredi menjalnika
F out. izračunano = F out x K dir, (6)
F out - radialna konzolna obremenitev na sredini pristajalnega dela koncev izhodne gredi (začetni podatki), N
K dir - koeficient načina delovanja (formula 4.5)
3. Parametri izbranega menjalnika morajo izpolnjevati naslednje pogoje:
1) T nom > T izrač., (7)
T nazivni navor na izhodni gredi menjalnika, podan v tem katalogu v tehničnih specifikacijah za vsak menjalnik, Nxm
T izračun - ocenjen navor na izhodni gredi menjalnika (formula 2), Nxm
2) F nom > F out calc (8)
F nazivna obremenitev konzole na sredini pristajalnega dela koncev izhodne gredi menjalnika, podana v tehničnih specifikacijah za vsak menjalnik, N.
F out.calc - izračunana radialna konzolna obremenitev na izhodni gredi menjalnika (formula 6), N.
3) R dovod izrač< Р терм х К т, (9)
R in.calc - ocenjena moč elektromotorja (formula 10), kW
P izraz - toplotna moč, katere vrednost je podana v tehničnih značilnostih menjalnika, kW
K t - temperaturni koeficient, katerega vrednosti so podane v tabeli 6
Nazivna moč elektromotorja je določena z:
R in.calc \u003d (T out x n out) / (9550 x učinkovitost), (10)
T out - ocenjeni navor na izhodni gredi menjalnika (formula 2), Nxm
n out - hitrost izhodne gredi menjalnika, vrt./min
Učinkovitost - učinkovitost menjalnika,
A) Za čelne menjalnike:
- enostopenjski - 0,99
- dvostopenjski - 0,98
- tristopenjski - 0,97
- štiristopenjski - 0,95
B) Za stožčaste zobnike:
- enostopenjski - 0,98
- dvostopenjski - 0,97
C) Za stožčasto-vijačne menjalnike - kot produkt vrednosti stožčastih in valjastih delov menjalnika.
D) Pri polžastih menjalnikih je učinkovitost podana v tehničnih specifikacijah za vsak menjalnik za vsako prestavno razmerje.

Če želite kupiti polžasti menjalnik, ugotoviti stroške menjalnika, izbrati prave komponente in pomagati pri vprašanjih, ki se pojavijo med delovanjem, vam bodo pomagali vodje našega podjetja.
Tabela 1
tabela 2
|
Vodilni stroj |
Generatorji, dvigala, centrifugalni kompresorji, enakomerno obremenjeni transporterji, mešalniki tekočih snovi, centrifugalne črpalke, zobniki, vijačni, ogrodje mehanizmi, puhala, ventilatorji, filtrirne naprave. |
Čistilne naprave, neenakomerno obremenjeni transporterji, vitli, kabelski bobni, tek, struženje, dvižni mehanizmi žerjavov, mešalniki betona, peči, prenosne gredi, rezalniki, drobilniki, mlini, oprema za naftno industrijo. |
Prebijalne stiskalnice, vibratorji, žage, sita, enovaljni kompresorji. |
Oprema za proizvodnjo izdelkov iz gume in plastike, mešalni stroji in oprema za profilirano jeklo. |
|
električni motor, parna turbina |
||||
|
4, 6-valjni motorji z notranjim zgorevanjem, hidravlični in pnevmatski motorji |
||||
|
1, 2, 3-valjni motorji z notranjim zgorevanjem |
Tabela 3
Tabela 4
Tabela 5
Tabela 6
|
hlajenje |
Temperatura okolice, C o |
Trajanje vključitve, PV%. |
||||
|
Reduktor brez tujca hlajenje. |
||||||
|
Reduktor s spiralo za vodno hlajenje. |
||||||
Algoritem #1
Izračun zaprtega orodja
Cilindrično orodje
A l g o r i t m
izračun zaprto orodješprica in spiralna
cilindrični zobnik
Pooblastilo mora vsebovati naslednje podatke:
Moč na zobniški gredi ......... .P 1, kW;
Hitrost prestave ................................. n 1, vrt/min;
Hitrost kolesa ................................. n 2, vrt/min;
(mogoče je nastaviti druge parametre, ki jih določi
prejšnje);
reverzibilnost prenosa;
Življenjska doba menjalnika ................................. t d, leta;
Letna stopnja porabe.... K G;
Dnevna stopnja uporabe ... K Z;
- histogram nalaganja:
1. odstavek. Priprava projektnih parametrov.
1.1. Predhodna določitev prestavnega razmerja
Koordinirajte s standardnimi vrednostmi (tabela 1.1). Izberite najbližjo standardno vrednost U.
Dejanska izhodna hitrost
RPM (2)
Odstopanje od vrednosti nalog
![]() (3)
(3)
1.2. Navor na zobniški gredi
1.3. Čas prenosa
t = t g (leta)×365(dnevi)×24(ure)× TO g× TO s, ura. (5)
2. točka. Izbira materiala . Določanje dovoljenih napetosti za projektni izračun.
2.1. Izbira materiala (tabela 1.2). Nadaljnja predstavitev bo vzporedna: za čelno prestavo - v levem stolpcu, za vijačno prestavo - v desnem stolpcu.
Glede na izbrani material in trdoto površine je glavno merilo oblikovanja kontaktna trdnost.
2.2. Dovoljene kontaktne napetosti zobnika zaradi utrujenosti.
Izračun za te dovoljene napetosti preprečuje lomljenje delovnih površin zaradi utrujenosti v določeni življenjski dobi. t.
![]() (6)
(6)
kje Z R- koeficient, ki upošteva hrapavost površine (tabela 1.3).
Z V- koeficient ob upoštevanju obodne hitrosti. Za dane vrednosti vrtljajev gredi je mogoče predhodno domnevati, v katerem intervalu je periferna hitrost prenosa (tabela 1.3).
S H- varnostni faktor (tabela 1.3).
ZN- faktor trajnosti
![]() (7)
(7)
N HG- osnovno število ciklov
NGH = (HB) 3 £ 12×10 7 . (osem)
Za vijačno prestavo, če je HB>350, preračunaj enote HRC v enotah HB(Tabela 1.4).
N ON
N ON 1 = 60x n 1× t× e H. (9)
e H- faktor enakovrednosti, ki je določen s histogramom obremenitve
 , (10)
, (10)
kje Tmax- največji med dolgodelujočimi trenutki. V našem primeru bo to trenutek T, efektivno t 1 del celotnega obratovalnega časa t; potem je q 1 =1.
T i- vsak naslednji korak obremenitve, ki deluje skozi čas t i =t i × t. Prva stopnja histograma, enaka po obremenitvi T vrh = q vrh × T, se pri izračunu števila ciklov ne upošteva. Ta obremenitev z majhnim številom ciklov ima učinek utrjevanja na površini. Uporablja se za testiranje statične trdnosti.
m- stopnja krivulje utrujenosti, enaka 6. Tako,
Ekvivalentni koeficient kaže, da je trenutek T deluje med e H×tčasa, ima enak učinek utrujenosti kot dejanska obremenitev, ki ustreza histogramu obremenitve skozi čas t.
s Hlim- meja kontaktne vzdržljivosti prestave, ko je doseženo osnovno število ciklov N HG(Tabela 1.5).
Nazivne dovoljene kontaktne napetosti za prenos
3. točka. Izbira projektnih koeficientov.
3.1 Izbira faktorja obremenitve. Faktor obremenitve za predhodne izračune se izbere iz intervala
K H = 1,3...1,5. (šestnajst)
Če so v izračunani prestavi zobniki nameščeni simetrično glede na opore, KH izbran bližje spodnji meji. Za vijačne zobnike KH manj se vzame zaradi večje uglajenosti delovanja in posledično manjše dinamične obremenitve.
3.2. Izbira faktorja širine zobnika (tabela 1.6). Za menjalnike je priporočljivo:
- za večstopenjsko y a = 0,315 ... 0,4;
- za enostopenjski y a = 0,4 ... 0,5;
zgornja meja je izbrana za vijačne zobnike;
- za ševronske zobnike y a = 0,630 ... 1,25.
4. točka. Izračun načrtovanja prenosa.
4.1. Določanje razdalje središča.
Za zaprto prestavo, če imata oba ali vsaj eno od koles trdoto manjšo od 350 enot, se konstrukcijski izračun izvede za trdnost stika zaradi utrujenosti, da se prepreči lomljenje med določeno življenjsko dobo. t.
 , mm. (17)
, mm. (17)
tukaj T 1 - trenutek na gredi prestave v Nm.
Številčni koeficient:
| Ka = 450; | Ka= 410. |
Izračunana sredinska razdalja se vzame kot najbližji standard v skladu s tabelo 1.7.
4.2. Izbira običajnega modula. Za zobnike HB£350 za vsaj eno kolo je priporočljivo izbrati običajni modul iz naslednjega razmerja
![]() . (18)
. (18)
Izpišite vse standardne vrednosti normalnega modula (tabela 1.8), ki so vključene v interval (18).
Kot prvi približek si je treba prizadevati za izbiro minimalnega modula, vendar za prenose moči ni priporočljiv modul, manjši od 1,25 mm. Pri izbiri modula za čelni zobnik, da bi se izognili spreminjanju prestav, je potrebno, da je skupno število zob
se je izkazalo za celo število. Potem
Če je ulomno število zaokroženo na celo število in število zob kolesa
4.3. Za vijačni prenos števila zob
Število zob je treba zaokrožiti na najbližje celo število.
4.5. Premeri nagiba
Izračunajte premere na tretje decimalno mesto.
Izvedite ček
Za nespremenjen prenos in višinsko spreminjanje mora biti natančno na tri decimalna mesta.
4.6. Premeri ušes
4.7. Premeri votline
 (26)
(26)
4.8. Ocenjena širina kolesa
Pri deljeni prestavi je širina vsakega kolesa razdeljenega para
V ševronskem menjalniku polna širina kolesa
kje C- širina srednjega utora za izhod orodja je izbrana iz tabele 1.16. Premer utora je za 0,5× manjši od premera votline m.
4.9. Končna stopnja prekrivanja
![]() . (31)
. (31)
4.10. Periferna hitrost
Če se hitrost razlikuje od hitrosti, ki je bila pogojno sprejeta v odstavku 2.2 pri določanju koeficienta K V, se vrnite na klavzulo 2.2 in razjasnite dovoljene napetosti.
Glede na obodno hitrost izberite stopnjo natančnosti prenosa (tabela 1.9). Za zobnike splošne tehnike pri hitrostih največ 6 m / s za čelne zobnike in ne več kot 10 m / s za vijačne zobnike je izbrana 8. stopnja natančnosti. Vijačni zobnik je mogoče obdelati do 7. stopnje natančnosti, po površinskem utrjevanju HDTV-ja pa bodo nastale deformacije prenesle parametre zobnika na 8. stopnjo natančnosti.
5. točka. Preverite izračune.
5.1. Za verifikacijske izračune za kontaktno in upogibno trdnost določimo faktorje obremenitve.
![]() . (33)
. (33)
![]() . (34)
. (34)
KHV in KFV- koeficienti notranje dinamične obremenitve. Izbrani so iz tabele 1.10. Če vrednost hitrosti pade v intervale območja, se koeficient izračuna z interpolacijo.
KH b in KFb- koeficienti koncentracije obremenitve (neenakomerna porazdelitev obremenitve po dolžini kontaktnih vodov). Njihove vrednosti so izbrane iz tabele 1.11 z interpolacijo.
K H a in K F a- koeficienti porazdelitve obremenitve med zobmi. Izbrano iz tabele 1.12 z interpolacijo.
5.2. Test kontaktne napetosti
![]() . (35)
. (35)
Z E - materialni koeficient. Za jeklo
Z E = 190.
Z e - koeficient za upoštevanje skupne dolžine kontaktnih vodov
| Ostroge; (36) | spiralni; (37) |
Z H je faktor oblike spojnih površin. Izbrano iz tabele 1.13 z interpolacijo.
F t- obodna sila
Odstopanje
![]() . (39)
. (39)
Znak (+) označuje preobremenitev, znak (-) pa preobremenitev.
PRIPOROČILA
Podobremenitev in preobremenitev sta dovoljeni največ 5%.
Če Ds H presega ±20%, potem je treba za menjalnik s standardnimi parametri spremeniti sredinsko razdaljo a W in se vrnite k točki 4.2.
Če Ds H presega ±12 %:
V primeru podobremenitve - zmanjšajte y a in se vrnite na točko 4.8.
V primeru preobremenitve povečajte y a , ki ne presega priporočenih vrednosti za to vrsto prenosa in se vrnite na odstavek 4.8. Trdoto zobne površine lahko spremenite v priporočenih mejah in se vrnete na 2. korak.
Če Ds H bo manjša od 12%, je mogoče s toplotno obdelavo popraviti dovoljene napetosti in se vrniti na točko 2.
5.3. Preizkus upogibne utrujenosti.
5.3.1. Dovoljene upogibne napetosti
![]() . (40)
. (40)
Preverjanje teh obremenitev preprečuje utrujenost razpok na korenu zoba med določeno življenjsko dobo. t in posledično propadanje zob.
Y R- koeficient hrapavosti prehodne krivulje (tabela 1.14).
Y X- faktor lestvice (tabela 1.14).
Y d je koeficient občutljivosti materiala na koncentracijo napetosti (tabela 1.14).
Y A- faktor reverzibilnosti obremenitve (tabela 1.14).
Y N- koeficient trajnosti. Izračunano ločeno za zobnik in kolo
N FG- osnovno število ciklov. Za jeklene zobe
N FG= 4×10 6 . (42)
m- stopnja krivulje utrujenosti. V prejšnji in naslednjih formulah za izračun upogibne trdnosti zaradi utrujenosti:
Za kaljena jekla
za kaljena jekla
NFE 1 - enakovredno število ciklov prestav
NFE 1 = 60x n 1× t× eF. (43)
eF- razmerje enakovrednosti
 . (44)
. (44)
V skladu s histogramom obremenitve, kot pri izračunu kontaktne trdnosti,
Ekvivalentno število kolesnih ciklov
S F in s flim- varnostni faktor in meja vzdržljivosti zoba sta izbrana iz tabele 1.15.
5.3.2. Delovne napetosti upogiba. Določeno ločeno za zobnik in kolo
![]() . (47)
. (47)
YFS- faktor oblike zob
![]() . (48)
. (48)
X- faktor premika orodja.
Z V- enakovredno število zob
Y e - koeficient, ki upošteva prekrivanje zob v mreži
Y b - koeficient kota nagiba zoba
![]() . (53)
. (53)
Če Y b se je izkazalo za manj kot 0,7, ga je treba vzeti
Y b = 0,7
Delovne napetosti se določijo za vsako prestavo ali za tisto z manjšim razmerjem
Dejanska trdnost zaradi upogibne utrujenosti
Vrednost varnostnega faktorja upogibne utrujenosti kaže na stopnjo zanesljivosti glede na verjetnost zloma zoba. Višji kot je ta koeficient, manjša je verjetnost okvare zaradi utrujenosti zob.
5.4. Preizkusite kontaktno statično trdnost.
![]() . (56)
. (56)
Tmax=
[s] Hmax- dovoljene statične kontaktne napetosti.
Za izboljšane zobe
![]() . (57)
. (57)
Te dovoljene napetosti preprečujejo plastično deformacijo površinskih plasti zoba.
Mejo tečenja s T lahko izberete iz tabele 1.2.
Za površinsko utrjene zobe, vključno s kaljenim HDTV
![]() . (58)
. (58)
Te dovoljene napetosti preprečujejo pokanje površinskih plasti zoba.
5.5. Preverjanje upogibne statične trdnosti. Opravljeno je preverjanje zobnikov in koles
![]() . (59)
. (59)
Dovoljene statične upogibne napetosti. Za izboljšane in površinsko utrjene zobe
![]() . (60)
. (60)
Preverjanje teh dovoljenih napetosti preprečuje takojšen zlom zoba, ko je zobnik preobremenjen.
Tabela 1.1
Tabela 1.2
| Razred jekla | Toplotna obdelava | Velikost odseka, mm, ne več | Površinska trdota HB oz HRC | Natezna trdnost s b, MPa | Meja tečenja s T, MPa |
| Izboljšava | HB 192...228 | ||||
| Izboljšanje normalizacije | HB 170...217 HB 192...217 | ||||
| Izboljšanje normalizacije | HB 179...228 HB 228...255 | ...800 | |||
| 40X | Izboljšanje Izboljšanje Izboljšanje | 100...300 300...500 | HB 230...280 HB 163...269 HB 163...269 | ||
| 40HN | Izboljšajte Izboljšajte temperament | 100...300 | HB 230...300 HB³241 HRC 48...54 | ||
| 20X | Cementiranje | HRC 56...63 | |||
| 12ХН3А | Cementiranje | HRC 56...63 | |||
| 38HMYUA | Nitriranje | - | HRC 57...67 |
Opomba. Velikost preseka pomeni polmer obdelovanca zobniške gredi ali debelino platišča kolesa.
Tabela 1.3
Tabela 1.4
| HRC | ||||||
| HB |
Tabela 1.5
Tabela 1.6
Tabela 1.8
Tabela 1.9
Tabela 1.10
| Stopnja natančnosti | Trdota površine zoba | Vrsta prenosa | KHV | KFV | ||||||||
| Periferna hitrost V, gospa | ||||||||||||
| HB 1 in HB 2 >350 | naravnost | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | |
| kosa | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | ||
| HB 1 ali HB 2 350 £ | naravnost | 1,04 | 1,20 | 1.40 | 1,60 | 1,80 | 1,08 | 1,40 | 1,80 | - | - | |
| kosa | 1,02 | 1,08 | 1,16 | 1,24 | 1,32 | 1,03 | 1,16 | 1,32 | 1,48 | 1,64 | ||
| HB 1 in HB 2 >350 | naravnost | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | |
| kosa | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | ||
| HB 1 ali HB 2 350 £ | naravnost | 1,05 | 1,24 | 1,48 | 1,72 | 1,96 | 1,10 | 1,48 | 1,96 | - | - | |
| kosa | 1,02 | 1,10 | 1,19 | 1,29 | 1,38 | 1,04 | 1,19 | 1,38 | 1,57 | 1,77 | ||
| HB 1 in HB 2 >350 | naravnost | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | |
| kosa | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | ||
| HB 1 ali HB 2 350 £ | naravnost | 1,06 | 1,28 | 1,56 | 1,84 | - | 1,11 | 1,56 | - | - | - | |
| kosa | 1,02 | 1,11 | 1,22 | 1,34 | 1,45 | 1,04 | 1,22 | 1,45 | 1,67 | - |
Tabela 1.11
| koeficient KH b pri HB 1 350 £ oz HB 2 350 funtov | ||||||||||
| Zasnova menjalnika | Koeficient y d = b W/d 1 | |||||||||
| 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 | |
| Konzolni zobnik na krogličnih ležajih | 1,09 | 1,19 | 1,3 | - | - | - | - | - | - | - |
| Konzolni zobnik na valjčnih ležajih | 1,07 | 1,13 | 1,20 | 1,27 | - | - | - | - | - | - |
| Visokohitrostni par dvostopenjskega menjalnika razgrnjene sheme | 1,03 | 1,06 | 1,08 | 1,12 | 1,16 | 1,20 | 1,24 | 1,29 | - | - |
| Dvostopenjski koaksialni menjalnik z nizko hitrostjo | 1,02 | 1,03 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,24 | 1,30 |
| Nizkohitrostni par dvostopenjskega menjalnika razširjene in koaksialne sheme | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,25 |
| Enostopenjski čelni menjalnik | 1,01 | 1,02 | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,14 | 1,18 |
| Nizkohitrostni par dvostopenjskega menjalnika z razmaknjeno hitrostjo | 1,01 | 1,02 | 1,02 | 1,02 | 1,03 | 1,04 | 1,05 | 1,07 | 1,08 | 1,12 |
| koeficient KFb=(0,8...0,85)× KH b³1 |
Tabela 1.12
Tabela 1.14
| koeficient | Ime koeficienta | Vrednost koeficienta |
| Y R | Spiralni koeficient hrapavosti | Rezkanje in brušenje zobnikov Y R=1. Poliranje Y R=1,05...1,20. Višje vrednosti za izboljšanje in utrjevanje HDTV. |
| Y X | Faktor velikosti (faktor obsega) | Jeklo: toplotna obdelava v razsutem stanju Y X=1,03 - 0,006× m; 0,85 £ Y X 1 £. Površinsko utrjevanje, nitriranje Y X=1,05 - 0,005× m; 0,8 £ Y X 1 £. Lito železo s sferoidnim grafitom Y X=1,03 - 0,006× m; 0,85 £ Y X 1 £. Siva litina Y X=1,075 - 0,01× m;0,7 £ Y X 1 £. |
| Y d | Koeficient občutljivosti materiala na koncentracijo napetosti | Y d = 1,082 - 0,172× LGM. |
| Nadaljevanje tabele 1.14 | ||
| Y A | Faktor reverzibilnosti | Za nereverzibilno delovanje Y A=1. V obratnem obratovanju z enakimi pogoji obremenitve v obe smeri: za normalizirano in kaljeno jeklo Y A=0,65; za kaljeno jeklo Y A=0,75; za nitrirano jeklo Y A=0,9. |
Tabela 1.15
| Toplotna obdelava | Površinska trdota | Vrste jekla | s flim, MPa | S F z verjetnostjo neuničenja | |
| normalno | povečala | ||||
| Normalizacija, izboljšanje | 180...350 HB | 40,45,40X, 40XN, 35XM | 1,75×( HB) | 1,7 | 2,2 |
| Masivno utrjevanje | 45...55 HRC | 40H, 40HN, 40HFA | 500...550 | 1.7 | 2,2 |
| HDTV utrjevanje skozi | 48...52 HRC | 40X, 35XM, 40XN | 500...600 | 1,7 | 2,2 |
| HDTV površinsko utrjevanje | 48...52 HRC | 40X, 35XM, 40XN | 600...700 | 1,7 | 2,2 |
| Nitriranje | 57...67 HRC | 38HMYUA | 590...780 | 1,7 | 2,2 |
| Cementiranje | 56...63 HRC | 12ХН3А | 750...800 | 1,65...1,7 | 2...2,2 |
Tabela 1.16
| Modul | Kot vijačnice b 0 | Modul | Kot zoba b 0 | ||||
| m, mm | m, mm | ||||||
| Širina utora C, mm | Širina utora C, mm | ||||||
| 2,5 | |||||||
| 3,0 | |||||||
| 3,5 | |||||||
Zahtevana pogonska moč je določena s formulo:
kje T 2 – moment na izhodni gredi (Nm);
n 2 - frekvenca vrtenja izhodne gredi (rpm).
Določitev potrebne moči elektromotorja.
Zahtevana moč motorja je določena s formulo

kje η menjalnik- učinkovitost menjalnika;
Glede na kinematično shemo danega pogona je učinkovitost menjalnika določena z odvisnostjo:
η menjalnik = η zaroka η 2 ležaji η sklopke ,
kje η zaroka– učinkovitost menjalnika; sprejeti η zaroka = 0,97 ;
η ležaji– učinkovitost para kotalnih ležajev; sprejeti η ležaji = 0,99 ;
η sklopke– učinkovitost sklopke; sprejeti η sklopke = 0,98 .
1.3. Določanje frekvence vrtenja gredi motorja.
Določimo območje hitrosti, v katerem se lahko nahaja sinhrona hitrost elektromotorja s formulo:
n Z = un 2 ,
kje u- prestavno razmerje stopnje; izberemo obseg prestavnih razmerij, ki je priporočljiv za eno stopnjo čelnega zobnika v območju od 2 - 5.
na primer: n Z = un 2 = (2 - 5)200 = 400 - 1000 vrt./min.
1.4. Izbira motorja.
Glede na zahtevano moč elektromotorja R slabosti.(glede na to R el.dv. ≥ R slabosti.) in sinhrono hitrost gredi n Z izberite elektromotor:
serija....
moč R= ……kW
sinhrona hitrost n Z= …..rpm
asinhrona hitrost n 1 = …..r/min.

riž. 1. Skica elektromotorja.
1.5. Določanje prestavnega razmerja menjalnika.

Glede na izračunano vrednost prestavnega razmerja izberemo standardno vrednost ob upoštevanju napake iz serije prestavnih razmerij. Sprejmi u Umetnost. = ….. .
1.6. Določitev, hitrosti in navori na gredi menjalnika.
Hitrost vhodne gredi n 1 = ….. vrt./min.
Hitrost izhodne gredi n 2 = ….. vrt./min.
Navor na kolesu izhodne gredi:

Navor na zobniku vhodne gredi:

2. IZRAČUN ZAPRTJENE PREVOZE.
2.1. Dizajnerski izračun.
1. Izbira materiala koles.
na primer:
Zobnik
HB = 269…302 HB = 235…262
HB 1 = 285 HB 2 = 250
2. Določimo dovoljene napetostne kontakte za zobnike in kolesa :

kje H lim - meja vzdržljivosti kontaktne površine zob, ki ustreza osnovnemu številu ciklov izmeničnih napetosti; določi se glede na trdoto površine zoba ali pa se nastavi številčna vrednost;
na primer: H lim = 2HB+70.
S H– varnostni faktor; za zobnike z enotno strukturo materiala in trdoto površine zob HB 350 priporočeno S H = 1,1 ;
Z N– koeficient trajnosti; za prestave pri dolgotrajnem delovanju z načinom konstantne obremenitve je priporočljivo Z N = 1 .
Končno se kot dovoljena kontaktna napetost vzame manjša od dveh vrednosti dovoljenih kontaktnih napetosti kolesa in zobnika [ H] 2 in [ H ] 1:[ H ] = [ H ] 2 .
3. Središčno razdaljo določimo iz pogoja kontaktne vzdržljivosti aktivnih površin zob .

kje E itd- zmanjšan modul elastičnosti kolesnih materialov; za jeklena kolesa se lahko sprejme E itd= 210 5 MPa;
ba- koeficient širine kolesa glede na središčno razdaljo; za kolesa, ki so nameščena simetrično glede na opore, je priporočljivo ψ ba = 0,2 – 0,4 ;
TO H je faktor koncentracije obremenitve pri izračunih za kontaktne napetosti.
Za določitev koeficienta TO H treba je določiti razmerje relativne širine obročnega zobnika glede na premer ψ bd : ψ bd = 0,5ψ ba (u1)=….. .
Glede na graf slike ... .. ob upoštevanju lokacije zobnika glede na nosilce, s trdoto HB 350, glede na vrednost koeficienta ψ bd najdemo: TO H = ….. .
Izračunamo središčno razdaljo:
na primer:
Pri menjalnikih se sredinska razdalja zaokroži glede na vrsto standardnih središčnih razdalj ali serijo Ra 40 .
Dodeli a W= 120 mm.
4. Določite prenosni modul.
m = (0,01 – 0,02)a W= (0,01 - 0,02)120 = 1,2 - 2,4 mm.
Za število modulov iz dobljenega intervala dodelimo standardno vrednost modula: m= 2 mm.
5. Določite število zob zobnika in koles.
Skupno število zob zobnika in kolesa se določi iz formule: a W = m(z 1 +z 2 )/2;
od tod z = 2a W /m= …..; sprejeti z = ….. .
Število zob zobnika: z 1 = z /(u1) = …..
Za odpravo podrezanih zob z 1 ≥ z min ; za spodbujevalni angažman z min = 17 . Sprejmi z 1 = ….. .
Število zob koles: z 2 = z - z 1 = .. Priporočeno z 2 100 .
6. Določimo prestavno razmerje.
Dejansko prestavno razmerje določimo po formuli:

Napaka v vrednosti dejanskega prestavnega razmerja iz izračunane vrednosti:

Pogoj natančnosti načrtovanja je izpolnjen.
Za prestavno razmerje menjalnika vzamemo u dejstvo = ….. .
7. Določimo glavne geometrijske dimenzije zobnika in kolesa.
Za kolesa, rezana brez odmika orodja:
premer nagibnega kroga
d W = d
kot vpetja in profilni kot
α W = α = 20º
premerov korakov
d 1 = z 1 m
d 2 = z 2 m
premer konic zob
d a1 = d 1 +2 m
d a2 = d 2 +2 m
premeri votlin
d f 1 = d 1 –2,5 m
d f 2 = d 2 –2,5 m
višina zoba
h = 2,25 m
širina zobnika
b w = ψ ba a W
širina zobnika in kolesnega obroča
b 2 = b w
b 1 = b 2 + (3 - 5) = ..... . Sprejmi b 1 = ….. mm.
preverite vrednost središčne razdalje
a w = 0,5 (d 1 + d 2 )

Priljubljeno
- Program za spreminjanje napadnega kota in naklona
- Dejanska izhodna hitrost Izračun zaprtega zobniškega sklopa
- Kakšen je postopek za uporabo službenega prevoza s strani zaposlenega
- sistem goriva za letalo
- Pogodba o evakuaciji vozila Standardna pogodba za evakuacijo vozila
- Učinkovitost buldožerjev in kako jih izboljšati Osnovne informacije o buldožerjih
- Toyotin proizvodni sistem (TPS) in vitka proizvodnja
- Izpitne karte poklica monter cevi
- Kaj storiti, če se vam ne zdi nič
- Globus - trgovine za vso družino