Obliczenia i selekcja (metodologia rosyjska) - przekładnia ślimakowa. Rzeczywista prędkość wyjściowa Obliczanie zamkniętego układu zębatego
Przykład 1
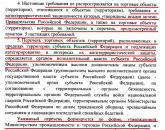
Określ przełożenie przekładni zębatej (ryc. 19), liczbę obrotów wału napędzanego i ogólny współczynnik wydajności (sprawność), jeśli liczba zębów kół jest równa: z 1 =30, z 2 =20, z 3 =45, z 4 =30, z 5 =20, z 6 =120, z 7 =25, z 8 =15 ; liczba obrotów wału wejściowego n 1 =1600 obr./min.
Rozwiązanie
Mechanizm składa się z czterech etapów: dwóch cylindrycznych z 1 - z 2 , z 3 - z 4 z przekładnią zewnętrzną, cylindryczną z 5 - z 6 z zazębieniem wewnętrznym i stożkowym z 7 - z 8 .
Całkowite przełożenie przekładni wielostopniowej jest równe iloczynowi przełożeń każdego stopnia, które tworzą ten mechanizm przekładni. W tym przypadku
 .
.
Znak (-) wskazuje, że kierunek obrotów kół w tych parach jest przeciwny. Kierunek obrotu kół w tym przypadku można również określić, umieszczając strzałki na schemacie (rys. 19).
Liczbę obrotów wału napędzanego określa przełożenie przekładni  obr/min
obr/min
Ogólna sprawność mechanizmu przekładni jest równa
gdzie wartości liczbowe są brane zgodnie ze stanem problemu T1.
Przykład 2
Tutaj  ,
, ,
, - przełożenia przerobionego mechanizmu (nośnika) h zatrzymało się, a stałe koło się kręci z 3
). Otrzymane przełożenie ze znakiem „+” wskazuje na zbieżność kierunków obrotu wału napędowego i napędzanego.
- przełożenia przerobionego mechanizmu (nośnika) h zatrzymało się, a stałe koło się kręci z 3
). Otrzymane przełożenie ze znakiem „+” wskazuje na zbieżność kierunków obrotu wału napędowego i napędzanego.
Przykład 3
Rozwiązanie
Jak w przykładzie 2, mechanizm ten odnosi się do jednostopniowej przekładni planetarnej i przełożenia z nośnika h do koła z 1 zależy od relacji
Przykład 4
Rozwiązanie
Złożona przekładnia składa się z dwóch stopni: pierwszy stopień to prosta para cylindryczna z uzębieniem zewnętrznym z 1 -z 2, drugi stopień to przekładnia planetarna N-z 5 , przekazujący ruch obrotowy z nośnika h do koła z 5 przez satelitę z 4 . Kierunek obrotu wału wyjściowego określa znak algebraiczny.
1. W przypadku przekładni dwustopniowej całkowite przełożenie jest określane przez przełożenia każdego stopnia, tj.
 .
.
Otrzymane przełożenie skrzyni  , który wskazuje na wzrost częstotliwości obrotów wału wyjściowego, a znak „+” wskazuje, że kierunki obrotów wałów są takie same.
, który wskazuje na wzrost częstotliwości obrotów wału wyjściowego, a znak „+” wskazuje, że kierunki obrotów wałów są takie same.
2. Określ prędkość kątową łącza wyjściowego  i jego przyspieszenie kątowe
i jego przyspieszenie kątowe 
 rad/s,
rad/s,
 rad/s 2 .
rad/s 2 .
3. Ponieważ obrót kół jest przyspieszony (akceptujemy przyspieszony jednostajnie), to czas, w którym prędkości kątowe podwoją się, określamy z zależności
 ,
,
gdzie  I
I  - prędkości kątowe odpowiednio na początku i na końcu rozpatrywanego okresu
- prędkości kątowe odpowiednio na początku i na końcu rozpatrywanego okresu  . Stąd
. Stąd
 od.
od.
4. Określ ogólną wydajność transmisji
Zadanie T2
Łącznik wyjściowy mechanizmu pokazany na schematach (ryc. 23–32) wykonuje ruch posuwisto-zwrotny (lub posuwisto-zwrotny) i jest obciążany na suw roboczy stałą siłą F C
(lub chwila T od) użyteczny opór. Na biegu jałowym, przy odwrotnym kierunku ruchu ogniwa wyjściowego, nie ma użytecznego oporu, ale szkodliwe nadal działają. Uwzględnienie wpływu tarcia w parach kinematycznych w aspekcie sprawności  mechanizm do ustalenia.
mechanizm do ustalenia.
1) moment napędowy T D , stała wielkości, która musi być przyłożona do łącza wejściowego w ruchu ustalonym z cyklem składającym się z suwów roboczych i jałowych;
2) pracy sił tarcia na suw roboczy i jałowy, zważywszy, że szkodliwy opór jest stały na każdym z suwów, ale na suw roboczy jest trzykrotnie większy niż na biegu jałowym;
3) zmiana energii kinetycznej mechanizmu podczas suwu roboczego i biegu jałowego;
4) moc wymagana od przemiennika, gdy łącze wejściowe obraca się ze średnią prędkością  oraz przeciętną (dla całego obrotu) moc użytecznych oporów i sił tarcia.
oraz przeciętną (dla całego obrotu) moc użytecznych oporów i sił tarcia.
Rozwiązanie tego problemu opiera się na równaniu ruchu mechanizmu, które ustala zależność między zmianą energii kinetycznej a pracą sił (prawo energii kinetycznej). Praca sił i momentów jest określona odpowiednio przez liniowe lub kątowe przemieszczenia ogniw, na które działają. W związku z tym wymagane jest określenie pozycji mechanizmu w skrajnych położeniach łącza wyjściowego. Ruchy połączeń, liniowe i kątowe, można określić na podstawie rysunku wykonanego w skali lub obliczone analitycznie. Wymiary ogniw, zgodnie z ich oznaczeniami na schemacie mechanizmu, oraz innymi niezbędnymi wartościami podano w tabelach danych liczbowych, gdzie  jest współczynnikiem sprawności, a w wariancie 9 m- moduł zębatkowy, z
- ilość zębów koła.
jest współczynnikiem sprawności, a w wariancie 9 m- moduł zębatkowy, z
- ilość zębów koła.
Tabela 17
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
OA, mm | ||||||||||
|
OS, mm | ||||||||||
|
słońce, mm | ||||||||||
|
AB, mm | ||||||||||
|
T od , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 18
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
oaa, mm | ||||||||||
|
AB, mm | ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 19
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
OA, mm | ||||||||||
|
OW, mm | ||||||||||
|
T od , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 20
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||||||||||||||
|
oaa, mm | ||||||||||||||||||||||
|
OW, mm | ||||||||||||||||||||||
|
BC=BD, mm | ||||||||||||||||||||||
|
F C , h | ||||||||||||||||||||||
|
| ||||||||||||||||||||||
|
| ||||||||||||||||||||||

 , rad/s
, rad/sTabela 21
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
r, mm | ||||||||||
|
oaa, mm | ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 22
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
OA, mm | ||||||||||
|
OW, mm | ||||||||||
|
BD, mm | ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
rad/s
,
rad/sTabela 23
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
OA, mm | ||||||||||
|
mi, mm | ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 24
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
r, mm | ||||||||||
|
oaa, mm | ||||||||||
|
r, mm | ||||||||||
|
| ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 25
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
oaa, mm | ||||||||||
|
AB, mm | ||||||||||
|
m, mm | ||||||||||
|
| ||||||||||
|
T od, Nm | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabela 26
|
Wartość |
Przedostatnia cyfra szyfru |
|||||||||
|
oaa, mm | ||||||||||
|
OW, mm | ||||||||||
|
F C , h | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sSekwencja zadania. W pierwszej kolejności należy zbudować mechanizm w skrajnych położeniach i w zadanych kierunkach prędkości kątowej ogniwa wejściowego  i stała siła F od
(lub chwila T od) użyteczna odporność na ustawianie suwów roboczych i jałowych.
i stała siła F od
(lub chwila T od) użyteczna odporność na ustawianie suwów roboczych i jałowych.
Podczas graficznego określania przemieszczeń liniowych i kątowych ogniw należy usunąć z rysunku:
1) dla ogniwa wejściowego jego kąty obrotu na skoku roboczym  i na biegu jałowym
i na biegu jałowym  X;
X;
2) dla łącza wyjściowego w ruchu posuwisto-zwrotnym przemieszczenie liniowe, tj. ruszaj się s,
lub podczas ruchu posuwisto-zwrotnego kąt wychylenia  .
.
W celu wyznaczenia stref suwów roboczych i jałowych łącznika wejściowego należy uwzględnić związek ruchu z pokazanym kierunkiem działania oporu użytecznego, który powinien uniemożliwić ruch łącznika wyjściowego podczas suwu roboczego .
W opcjach 5 i 8 ogniwa w górnej parze są wymuszone blokujące, zapobiegając odsuwaniu się ogniw od siebie: w opcji 8 wałek o promieniu r rolki w okrągłym rowku ogniwa wejściowego, osłonięte zewnętrznymi i wewnętrznymi profilami rowka, w wariancie 5 mimośród okrągły jest osłonięty ramą ogniwa wyjściowego.
WPROWADZENIE
Przekładnia ślimakowa odnosi się do kół zębatych z przecinającymi się wałami.
Główne zalety przekładni ślimakowych: możliwość uzyskania dużych przełożeń w jednej parze, płynne załączanie, możliwość samohamowania. Wady: stosunkowo niska wydajność, zwiększone zużycie i skłonność do zacierania, konieczność stosowania drogich materiałów przeciwciernych na koła.
Przekładnie ślimakowe są droższe i bardziej skomplikowane niż przekładnie, dlatego z reguły stosuje się je, gdy konieczne jest przeniesienie ruchu między przecinającymi się wałami, a także tam, gdzie potrzebne jest duże przełożenie.
Kryterium wykonania przekładni ślimakowych jest wytrzymałość powierzchniowa zębów, która zapewnia ich odporność na zużycie oraz brak wykruszeń i zatarcia, a także wytrzymałość na zginanie. Pod wpływem krótkotrwałych przeciążeń w przekładni ślimakowej zęby ślimacznicy są sprawdzane pod kątem zginania zgodnie z maksymalnym obciążeniem.
W przypadku korpusu ślimaka przeprowadza się obliczenia weryfikacyjne sztywności, a także obliczenia termiczne.
Projektowanie odbywa się w dwóch etapach: projektowanie - z warunków wytrzymałości styku wyznaczane są główne wymiary przekładni i weryfikacja - przy znanych parametrach przekładni w warunkach jej eksploatacji wyznaczane i porównywane są naprężenia kontaktowe i zginające z tymi, na które pozwala wytrzymałość materiału.
Siły obciążające łożyska są określane i łożyska są dobierane zgodnie z ich nośnością.
OBLICZENIA KINEMATYCZNE I SIŁY
Wybór silnika
Aby wybrać silnik elektryczny, określa się jego wymaganą moc i prędkość.
Zgodnie ze wstępnymi danymi projektowymi moc potrzebną do przeprowadzenia procesu technologicznego można określić ze wzoru:
Pout \u003d F t V, (2,1)
gdzie P out - moc na wale wyjściowym napędu, W;
F t - siła trakcyjna, N;
V to prędkość ruchu ciała roboczego, m/s;
P out \u003d 1,5 kW.
Określenie ogólnej sprawności prowadzić
Następnie, zgodnie z kinematycznym łańcuchem napędowym, sprawność całkowita. całego napędu oblicza się ze wzoru:
suma = s 1 s 2 s 3 s 4 (2.2)
h ogółem = 0,80,950,980,99 = 0,74.
Tak więc w oparciu o ogólną wydajność. stało się jasne, że podczas pracy napędu tylko 74% mocy z silnika trafi do bębna wyciągarki.
Określmy wymaganą moc silnika do normalnej pracy wyciągarki:
Akceptujemy silnik o mocy 2,2 kW.
Obliczanie prędkości obrotowej wału silnika
Ponieważ na tym etapie przełożenia przekładni napędowych są nadal nieznane, a prędkość wału silnika nie jest znana, możliwe staje się obliczenie pożądanej prędkości wału silnika.
W tym celu przeprowadzono następujące obliczenia.
Wyznaczanie prędkości wału wyjściowego napędu
Zgodnie z danymi początkowymi prędkość kątową wału wyjściowego oblicza się według wzoru:
gdzie u - prędkość kątowa, s -1;
D b - średnica bębna, m;
v to prędkość ruchu ciała roboczego, m/s.
Znajdźmy częstotliwość rotacji, znając prędkość kątową ze wzoru:
obr/min (2.5)
Określanie pożądanego przełożenia napędu
Z analizy wykresu kinematycznego napędu wyciągarki elektrycznej można zauważyć, że jej całkowite przełożenie (u total) jest wynikiem przełożenia reduktora ślimakowego.
Przyjmujemy u chp = 50. Zależność między częstotliwościami obrotów wału silnika n dv a wałem wyjściowym n z określa zależność:
n dv = n z u ogółem, (2,6)
wtedy pożądana prędkość wału silnika będzie wynosić:
n silnik = 38,250 = 1910 obr./min.
Zgodnie z aktualną gamą silników, najbliżej pożądanej prędkości jest silnik o prędkości synchronicznej 1500 obr/min. W związku z powyższym ostatecznie akceptujemy silnik marki: 90L4/1395. Seria AIR, która posiada następujące cechy:
R dv \u003d 2,2 kW;
n silnik = 1500 obr/min.
Obliczenia kinematyczne
Całkowite przełożenie:
u ogółem \u003d n dv / \u003d 1500 / 38,2 \u003d 39,3.
Określmy wszystkie charakterystyki kinematyczne zaprojektowanego napędu, które będą potrzebne w przyszłości do szczegółowego zbadania przekładni. Wyznaczanie częstotliwości i prędkości obrotowych. Łatwo jest obliczyć prędkości obrotowe wszystkich wałów, zaczynając od wybranej prędkości obrotowej wału silnika elektrycznego, biorąc pod uwagę fakt, że prędkość obrotowa każdego kolejnego wału jest określona przez prędkość obrotową poprzedniego zgodnie z wzór (2.7), biorąc pod uwagę przełożenie:
gdzie n (i+1) - prędkość wału i+1, obr./min;
u i -(i+1) - przełożenie między wałami i i i+1.
Momenty na wałkach skrzyni biegów:
T 1 \u003d 9,5510 3 (P / n e) \u003d 9,5510 3 (2,2 / 1500) \u003d 14,0 Nm
T 2 \u003d T 1 u \u003d 14.039.3 \u003d 550 Nm.
Przekładnia ślimakowa to jedna z klas przekładni mechanicznych. Skrzynie biegów są klasyfikowane według rodzaju przekładni mechanicznej. Śruba pod przekładnią ślimakową wygląda jak robak, stąd nazwa.
Motoreduktor- jest to jednostka składająca się ze skrzyni biegów i silnika elektrycznego, które stanowią jedną całość. Motoreduktor ślimakowyUtworzony do pracy jako silnik elektromechaniczny w różnych maszynach ogólnego przeznaczenia. Warto zauważyć, że tego typu sprzęt doskonale sprawdza się zarówno pod stałymi, jak i zmiennymi obciążeniami.
W przekładni ślimakowej wzrost momentu obrotowego i spadek prędkości kątowej wału wyjściowego następuje w wyniku konwersji energii zawartej w dużej prędkości kątowej i małym momencie na wale wejściowym.
Błędy w obliczeniach i doborze skrzyni biegów mogą doprowadzić do jej przedwczesnej awarii, a co za tym idzie w najlepszym przypadku  do strat finansowych.
do strat finansowych.
Dlatego prace nad obliczeniami i doborem skrzyni biegów należy powierzyć doświadczonym specjalistom od projektowania, którzy uwzględnią wszystkie czynniki od lokalizacji skrzyni biegów w przestrzeni i warunków pracy po jej temperaturę nagrzewania podczas pracy. Po potwierdzeniu tego odpowiednimi obliczeniami specjalista zapewni dobór optymalnej skrzyni biegów do konkretnego napędu.
Praktyka pokazuje, że właściwie dobrana przekładnia zapewnia żywotność co najmniej 7 lat dla przekładni ślimakowych i 10-15 lat dla przekładni walcowych.
Wybór dowolnej skrzyni biegów odbywa się w trzech etapach:
1. Wybór typu skrzyni biegów
2. Dobór rozmiaru (rozmiaru) reduktora i jego charakterystyki.
3. Sprawdzenie obliczeń
1. Wybór typu skrzyni biegów
1.1 Dane początkowe:
Schemat kinematyczny napędu, ze wskazaniem wszystkich mechanizmów połączonych z przekładnią, ich przestrzennego rozmieszczenia względem siebie, ze wskazaniem punktów mocowania i sposobów mocowania przekładni.
1.2 Ustalenie położenia osi wałów skrzyni biegów w przestrzeni.
Przekładnie śrubowe:
Osie wału wejściowego i wyjściowego skrzyni biegów są równoległe do siebie i leżą tylko w jednej płaszczyźnie poziomej - poziomej skrzyni walcowej.
Osie wału wejściowego i wyjściowego skrzyni biegów są równoległe do siebie i leżą tylko w jednej płaszczyźnie pionowej - pionowej skrzyni biegów.
Oś wału wejściowego i wyjściowego skrzyni biegów może znajdować się w dowolnym położeniu przestrzennym, podczas gdy osie te leżą na tej samej linii prostej (zbieżności) - współosiowa przekładnia cylindryczna lub planetarna.
Przekładnie stożkowo-walcowe:
Osie wału wejściowego i wyjściowego skrzyni biegów są do siebie prostopadłe i leżą tylko w jednej płaszczyźnie poziomej.
Przekładnie ślimakowe:
Oś wałów wejściowych i wyjściowych przekładni może znajdować się w dowolnym położeniu przestrzennym, przy czym przecinają się one pod kątem 90 stopni i nie leżą w tej samej płaszczyźnie - jednostopniowa przekładnia ślimakowa.
Oś wału wejściowego i wyjściowego skrzyni biegów może znajdować się w dowolnym położeniu przestrzennym, przy czym są one do siebie równoległe i nie leżą w tej samej płaszczyźnie lub przecinają się pod kątem 90 stopni i nie leżą w tym samym samolocie - dwustopniowa skrzynia biegów.
1.3 Ustalenie sposobu montażu, pozycji montażu i możliwości montażu skrzyni biegów. 
Sposób mocowania przekładni oraz położenie montażowe (mocowanie na fundamencie lub na wale napędzanym mechanizmu napędowego) ustalane są według danych technicznych podanych w katalogu dla każdej przekładni indywidualnie.
Możliwość montażu ustalana jest według schematów podanych w katalogu. Schematy „Opcji montażu” podano w rozdziale „Oznaczenie skrzyń biegów”.
1.4 Ponadto przy wyborze typu skrzyni biegów można wziąć pod uwagę następujące czynniki:
1) Poziom hałasu
- najniższy - dla przekładni ślimakowych
- najwyższy - dla kół zębatych walcowych i stożkowych
2) Wydajność
- najwyższa - dla przekładni planetarnych i jednostopniowych czołowych,
- najniższa - w robaku, zwłaszcza dwustopniowa
Przekładnie ślimakowe są najlepiej stosowane w pracy przerywanej
3) Zużycie materiału przy tych samych wartościach momentu obrotowego na wale wolnoobrotowym
- najniższy - dla planetarnego jednostopniowego
4) Wymiary przy tych samych przełożeniach i momentach obrotowych:
- największa osiowa - współosiowa i planetarna
- największy w kierunku prostopadłym do osi - dla cylindrycznego
- najmniejszy promieniowy - do planetarny.
5) Koszt względny rub/(Nm) dla tych samych odległości osi:
- najwyższy - stożkowy
- najniższy - w planetarnym
2. Dobór rozmiaru (rozmiaru) reduktora i jego charakterystyki
2.1. Wstępne dane
Schemat kinematyczny napędu zawierający następujące dane:
- rodzaj maszyny napędowej (silnik);
- wymagany moment obrotowy na wale wyjściowym T wymagany, Nxm, lub wymagana moc układu napędowego P, kW;
- częstotliwość obrotu wału wejściowego skrzyni biegów n in, obr./min;
- częstotliwość obrotu wału wyjściowego skrzyni biegów n na zewnątrz, obr./min;
- charakter obciążenia (jednorodny lub nierówny, odwracalny lub nieodwracalny, obecność i wielkość przeciążeń, obecność wstrząsów, wstrząsów, wibracji);
- wymagany czas pracy skrzyni biegów w godzinach;
- średnia dzienna praca w godzinach;
- liczba uruchomień na godzinę;
- czas trwania wtrąceń z obciążeniem, PV%;
- warunki środowiskowe (temperatura, warunki odprowadzania ciepła);
- czas trwania wtrąceń pod obciążeniem;
- promieniowe obciążenie wspornikowe przyłożone w środku części podestowej końców wału wyjściowego F out i wału wejściowego F in;
2.2. Przy doborze rozmiaru skrzyni biegów obliczane są następujące parametry:
1) przełożenie skrzyni
U= n w / n poza (1)
Najbardziej ekonomiczna jest praca skrzyni biegów przy prędkości wejściowej mniejszej niż 1500 obr/min, a w celu dłuższej bezawaryjnej pracy skrzyni biegów zaleca się stosowanie prędkości wału wejściowego mniejszej niż 900 obr/min.
Przełożenie jest zaokrąglane w górę do najbliższej liczby zgodnie z tabelą 1.
W tabeli dobierane są typy skrzyń biegów, które spełniają dane przełożenie.
2) Obliczony moment obrotowy na wale wyjściowym skrzyni biegów
T calc \u003d T wymagane x K dir, (2)
T wymagane - wymagany moment obrotowy na wale wyjściowym, Nxm (dane początkowe lub wzór 3)
K dir - współczynnik trybu pracy
Przy znanej mocy układu napędowego:
T wymagane \u003d (P wymagane x U x 9550 x wydajność) / n in, (3)
Wymagane P - moc układu napędowego, kW
n in - częstotliwość obrotu wału wejściowego skrzyni biegów (pod warunkiem, że wał układu napędowego bezpośrednio przenosi obroty na wał wejściowy skrzyni biegów bez dodatkowego biegu), obr./min
U - przełożenie skrzyni biegów, wzór 1
Sprawność - sprawność skrzyni biegów
Współczynnik trybu pracy definiuje się jako iloczyn współczynników: 
Dla reduktorów biegów:
K dir \u003d K 1 x K 2 x K 3 x K PV x K ryk (4)
Dla przekładni ślimakowych:
K dir \u003d K 1 x K 2 x K 3 x K PV x K rev x K h (5)
K 1 - współczynnik rodzaju i charakterystyki układu napędowego, tabela 2
K 2 - współczynnik czasu trwania stołu roboczego 3
K 3 - współczynnik liczby startów tabela 4
K PV - współczynnik czasu trwania wtrąceń tabela 5
K rev - współczynnik odwracalności, przy pracy nieodwracalnej K rev = 1,0 przy pracy odwrotnej K rev = 0,75
K h - współczynnik uwzględniający położenie pary robaków w przestrzeni. Gdy ślimak znajduje się pod kołem, K h \u003d 1,0, gdy znajduje się nad kołem, K h \u003d 1,2. Gdy ślimak znajduje się z boku koła, K h \u003d 1,1.
3) Obliczone promieniowe obciążenie wspornika na wale wyjściowym skrzyni biegów
F wy. obliczone = F wy x K dir, (6)
F out - promieniowe obciążenie wspornika przyłożone w środku części podestowej końców wału wyjściowego (dane początkowe), N
K dir - współczynnik trybu pracy (wzór 4.5)
3. Parametry wybranej skrzyni biegów muszą spełniać następujące warunki:
1) T nom > T obliczone, (7)
T nom - znamionowy moment obrotowy na wale wyjściowym skrzyni biegów, podany w tym katalogu w danych technicznych każdej skrzyni biegów, Nxm
T calc - szacowany moment obrotowy na wale wyjściowym skrzyni biegów (wzór 2), Nxm
2) F nom > F wyliczona (8)
F nom - nominalne obciążenie wspornika w środku części podestowej końców wału wyjściowego skrzyni biegów, podane w specyfikacjach technicznych dla każdej skrzyni biegów, N.
F out.calc - obliczone promieniowe obciążenie wspornika na wale wyjściowym skrzyni biegów (wzór 6), N.
3) Obliczenie wlotu R< Р терм х К т, (9)
R in.calc - szacunkowa moc silnika elektrycznego (wzór 10), kW
P term - moc cieplna, której wartość podana jest w charakterystyce technicznej skrzyni biegów, kW
K t - współczynnik temperaturowy, którego wartości podano w tabeli 6
Moc znamionową silnika elektrycznego określa:
R in.calc \u003d (T out x n out) / (9550 x wydajność), (10)
T out - szacowany moment obrotowy na wale wyjściowym skrzyni biegów (wzór 2), Nxm
n out - prędkość wału wyjściowego skrzyni biegów, obr/min
Sprawność - sprawność skrzyni biegów,
A) Dla przekładni walcowych:
- jednostopniowy - 0,99
- dwustopniowy - 0,98
- trzystopniowy - 0,97
- czterostopniowy - 0,95
B) Dla kół zębatych stożkowych:
- jednostopniowy - 0,98
- dwustopniowy - 0,97
C) Dla przekładni stożkowo-walcowych - jako iloczyn wartości części stożkowych i cylindrycznych przekładni.
D) W przypadku przekładni ślimakowych sprawność podana jest w specyfikacjach technicznych dla każdej przekładni dla każdego przełożenia.

Aby kupić przekładnię ślimakową, poznać koszt przekładni, dobrać odpowiednie komponenty i odpowiedzieć na pytania pojawiające się podczas eksploatacji, pomogą Państwu kierownicy naszej firmy.
Tabela 1
Tabela 2
|
Wiodąca maszyna |
Generatory, windy, sprężarki odśrodkowe, przenośniki równomiernie obciążone, mieszalniki substancji płynnych, pompy odśrodkowe, przekładnie, mechanizmy śrubowe, wysięgników, dmuchawy, wentylatory, urządzenia filtrujące. |
Stacje uzdatniania wody, nierównomiernie obciążone przenośniki, wciągarki, bębny kablowe, biegowe, obracające, mechanizmy podnoszenia dźwigów, betoniarki, piece, wały napędowe, przecinarki, kruszarki, młyny, urządzenia dla przemysłu naftowego. |
Wykrawarki, wibratory, tartaki, przesiewacze, kompresory jednocylindrowe. |
Urządzenia do produkcji wyrobów gumowych i tworzyw sztucznych, mieszalniki i urządzenia do kształtowania stali. |
|
silnik elektryczny, turbina parowa |
||||
|
4, 6 cylindrowe silniki spalinowe, silniki hydrauliczne i pneumatyczne |
||||
|
1, 2, 3 cylindrowe silniki spalinowe |
Tabela 3
Tabela 4
Tabela 5
Tabela 6
|
chłodzenie |
Temperatura otoczenia, C o |
Czas trwania włączenia, PV%. |
||||
|
Reduktor bez outsider chłodzenie. |
||||||
|
Reduktor ze spiralą chłodzącą wodę. |
||||||
Algorytm #1
Obliczanie zamkniętego biegu
Przekładnia cylindryczna
A l g o r i t m
obliczenie zamknięty bieg ostroga i spirala
koło zębate cylindryczne
Specyfikacja powinna zawierać następujące informacje:
Moc na wale zębatym .......... .P 1, kW;
Prędkość biegu .............................. n 1, obr./min;
Prędkość koła .............................. n 2, obr./min;
(można ustawić inne parametry, określone przez
poprzednie);
odwracalność transmisji;
Żywotność przekładni .................................. T d, lata;
Roczny wskaźnik wykorzystania.... K G;
Dzienny wskaźnik wykorzystania... K od;
- wczytywanie histogramu:
Paragraf 1. Przygotowanie parametrów projektowych.
1.1. Wstępne określenie przełożenia
Współrzędne z wartościami standardowymi (tabela 1.1). Wybierz najbliższą wartość standardową U.
Rzeczywista prędkość wyjściowa
Obroty (2)
Odchylenie od wartości SIWZ
![]() (3)
(3)
1.2. Moment obrotowy na wale zębatym
1.3. Czas transmisji
T = T g (lata)×365(dni)×24(godziny)× DO g× DO s, godzina. (pięć)
Punkt 2. Wybór materiału . Wyznaczanie naprężeń dopuszczalnych do obliczeń projektowych.
2.1. Wybór materiału (tabela 1.2). Dalsza prezentacja odbędzie się równolegle: dla koła czołowego - w lewej kolumnie, dla koła śrubowego - w prawej kolumnie.
W zależności od wybranego materiału i twardości powierzchni, głównym kryterium projektowym jest wytrzymałość styku.
2.2. Dopuszczalne zmęczeniowe naprężenia kontaktowe przekładni.
Obliczenie tych dopuszczalnych naprężeń zapobiega odpryskom zmęczeniowym powierzchni roboczych w danym okresie użytkowania. T.
![]() (6)
(6)
gdzie ZR- współczynnik uwzględniający chropowatość powierzchni (tabela 1.3).
Z V- współczynnik uwzględniający prędkość obwodową. Dla podanych wartości prędkości wału można wstępnie założyć, w jakim przedziale leży obwodowa prędkość transmisji (tabela 1.3).
CII- współczynnik bezpieczeństwa (tabela 1.3).
ZN- współczynnik trwałości
![]() (7)
(7)
N HG- bazowa liczba cykli
NGH = (HB) 3 zł 12×10 7 . (8)
Dla przekładni śrubowej, jeśli ma HB>350, przelicz jednostki HRC w jednostkach HB(Tabela 1.4).
N HE
N HE 1 = 60x n 1× T× e H. (9)
e H- współczynnik równoważności, który jest określony przez histogram obciążenia
 , (10)
, (10)
gdzie Tmax- największy z długo działających momentów. W naszym przypadku to będzie ten moment T, efektywny t 1 część całkowitego czasu pracy T; wtedy q 1 =1.
T i- każdy kolejny krok obciążenia działający w czasie T ja =t ja × T. Pierwszy etap histogramu, równy obciążeniu T szczyt = q szczyt × T, nie jest brane pod uwagę przy obliczaniu liczby cykli. To obciążenie przy niewielkiej liczbie cykli powoduje twardnienie powierzchni. Służy do badania wytrzymałości statycznej.
m- stopień krzywej zmęczenia równy 6. Tak więc,
Współczynnik równoważności pokazuje, że moment T działa podczas e H×t czas, ma taki sam efekt zmęczeniowy jak rzeczywiste obciążenie odpowiadające histogramowi obciążenia w czasie T.
s Hlim- granica wytrzymałości kontaktowej przekładni po osiągnięciu bazowej liczby cykli N HG(Tabela 1.5).
Znamionowe dopuszczalne naprężenia kontaktowe dla przenoszenie
Punkt 3. Wybór współczynników projektowych.
3.1 Wybór współczynnika obciążenia. Współczynnik obciążenia do obliczeń wstępnych wybiera się z przedziału
K H = 1,3...1,5. (16)
Jeżeli w obliczonym biegu koła zębate są usytuowane symetrycznie względem podpór, KH wybrany bliżej dolnej granicy. Do kół zębatych śrubowych KH mniej jest pobierane ze względu na większą płynność działania, a w konsekwencji mniejsze obciążenie dynamiczne.
3.2. Dobór współczynnika szerokości przekładni (tabela 1.6). Do napędów zębatych zaleca się:
- dla wielostopniowego y a = 0,315 ... 0,4;
- dla jednostopniowego y a = 0,4 ... 0,5;
górna granica jest wybrana dla kół zębatych śrubowych;
- dla kół zębatych jodełkowych y a = 0,630 ... 1,25.
Pozycja 4. Przenieś obliczenia projektowe.
4.1. Wyznaczanie odległości od środka.
W przypadku przekładni zamkniętej, jeśli oba lub co najmniej jedno z kół ma twardość mniejszą niż 350 jednostek, obliczenia projektowe przeprowadza się pod kątem wytrzymałości styku zmęczeniowego, aby zapobiec odpryskiwaniu w danym okresie użytkowania T.
 , mm. (17)
, mm. (17)
Tutaj T 1 - moment na wale koła zębate w Nm.
Współczynnik liczbowy:
| Ka = 450; | Ka= 410. |
Obliczoną odległość osiową przyjmuje się jako najbliższy standard zgodnie z tabelą 1.7.
4.2. Wybór normalnego modułu. Do kół zębatych HB 350 funtów za co najmniej jedno koło zaleca się wybrać normalny moduł z następującego stosunku
![]() . (18)
. (18)
Wypisz wszystkie standardowe wartości modułu normalnego (Tabela 1.8) zawarte w przedziale (18) .
W pierwszym przybliżeniu należy dążyć do doboru modułu minimalnego, jednak do przenoszenia mocy moduł mniejszy niż 1,25 mm nie jest zalecany. Wybierając moduł do koła zębatego walcowego, aby uniknąć modyfikacji koła zębatego konieczne jest, aby łączna liczba zębów
okazał się liczbą całkowitą. Następnie
Jeśli liczba ułamkowa jest zaokrąglana w górę do liczby całkowitej, a liczba zębów koła
4.3. Dla przekładni śrubowej liczba zębów
Liczbę zębów należy zaokrąglić do najbliższej liczby całkowitej.
4.5. Średnice podziałowe
Oblicz średnice z dokładnością do trzeciego miejsca po przecinku.
Przeprowadź kontrolę
W przypadku niezmodyfikowanej transmisji i modyfikacji na dużych wysokościach musi być ona z dokładnością do trzech miejsc po przecinku.
4.6. Średnice ucha
4.7. Średnice wnęki
 (26)
(26)
4.8. Szacowana szerokość koła
W dzielonym biegu szerokość każdego koła z dzielonej pary wynosi
W przekładni chevron pełna szerokość koła
gdzie C- szerokość rowka środkowego dla wyjścia narzędzia dobierana jest z tabeli 1.16. Średnica rowka jest mniejsza niż średnica wnęki o 0,5× m.
4.9. Stopień końcowy nakładania
![]() . (31)
. (31)
4.10. Prędkość obwodowa
Jeżeli prędkość różni się od wstępnie przyjętej w pkt 2.2 przy określaniu współczynnika KV, należy wrócić do punktu 2.2 i wyjaśnić dopuszczalne naprężenia.
W zależności od prędkości obwodowej wybrać stopień dokładności transmisji (tabela 1.9). W przypadku przekładni ogólnej inżynierii przy prędkościach nie większych niż 6 m / s dla kół zębatych walcowych i nie większych niż 10 m / s dla kół zębatych śrubowych wybiera się 8. stopień dokładności. Koło zębate śrubowe można obrabiać z 7 stopniem dokładności, a po utwardzeniu powierzchni HDTV powstałe odkształcenia przeniosą parametry przekładni do 8 stopnia dokładności.
Pozycja 5. Sprawdź obliczenia.
5.1. Do obliczeń weryfikacyjnych zarówno wytrzymałości kontaktowej, jak i wytrzymałości na zginanie, określamy współczynniki obciążenia.
![]() . (33)
. (33)
![]() . (34)
. (34)
KHV I KFV- współczynniki wewnętrznego obciążenia dynamicznego. Są one wybierane z tabeli 1.10. Jeżeli wartość prędkości mieści się w przedziałach zakresu, współczynnik obliczany jest przez interpolację.
KH b I KFb- współczynniki koncentracji obciążenia (nierównomierny rozkład obciążenia na długości linii jezdnych). Ich wartości są wybierane z Tabeli 1.11 przez interpolację.
KHa I K F a- współczynniki rozkładu obciążenia między zębami. Wybrany z tabeli 1.12 przez interpolację.
5.2. Test napięcia dotykowego
![]() . (35)
. (35)
Z E - współczynnik materiałowy. Do stali
Z E = 190.
Z e - współczynnik uwzględniający całkowitą długość linii jezdnych
| Ostrogi; (36) | Śrubowaty; (37) |
Z H jest współczynnikiem kształtu współpracujących powierzchni. Wybrany z tabeli 1.13 przez interpolację.
F t- siła obwodowa
Odchylenie
![]() . (39)
. (39)
Znak (+) oznacza niedociążenie, znak (-) oznacza przeciążenie.
ZALECENIA
Zarówno niedociążenie, jak i przeciążenie nie mogą przekraczać 5%.
Jeśli Ds h przekracza ±20%, to dla skrzyni biegów o standardowych parametrach należy zmienić rozstaw osi W i wróć do punktu 4.2.
Jeśli Ds h przekracza ±12%:
W przypadku niedociążenia - zmniejszyć y a i powrócić do punktu 4.8.
W przypadku przeciążenia - zwiększyć y a , nie przekraczając zalecanych wartości dla tego typu przekładni i powrócić do pkt 4.8. Możesz zmienić twardość powierzchni zęba w zalecanych granicach i wrócić do kroku 2.
Jeśli Ds h wyniesie mniej niż 12%, możliwe jest skorygowanie dopuszczalnych naprężeń poprzez obróbkę cieplną i powrót do punktu 2.
5.3. Test zmęczenia przy zginaniu.
5.3.1. Dopuszczalne naprężenia zginające
![]() . (40)
. (40)
Testowanie pod kątem tych naprężeń zapobiega pękaniu zmęczeniowemu korzenia zęba w danym okresie użytkowania. T aw konsekwencji próchnica.
Y R- współczynnik chropowatości krzywej przejściowej (tabela 1.14).
Y X- współczynnik skali (tabela 1.14).
Y d jest współczynnikiem wrażliwości materiału na koncentrację naprężeń (tabela 1.14).
Y A- współczynnik odwracalności obciążenia (tabela 1.14).
T N- współczynnik trwałości. Obliczane osobno dla przekładni i koła
N FG- podstawowa liczba cykli. Do stalowych zębów
N FG= 4×106. (42)
m- stopień krzywej zmęczeniowej. W poprzednich i kolejnych wzorach do obliczania zmęczeniowej wytrzymałości na zginanie:
Do stali hartowanych
do stali hartowanych
NFE 1 - równoważna liczba cykli przekładni
NFE 1 = 60x n 1× T× eF. (43)
eF- stosunek równoważności
 . (44)
. (44)
Zgodnie z histogramem obciążenia, jak w obliczeniach siły kontaktu,
Równoważna liczba cykli koła
S F andy flim- współczynnik bezpieczeństwa i granicę wytrzymałości zęba dobiera się z tabeli 1.15.
5.3.2. Naprężenia robocze zginania. Określane osobno dla przekładni i koła
![]() . (47)
. (47)
YFS- współczynnik kształtu zęba
![]() . (48)
. (48)
x- współczynnik przesunięcia narzędzia.
Z V- równoważna liczba zębów
Y e - współczynnik uwzględniający nakładanie się zębów w siatce
Y b - współczynnik kąta nachylenia zęba
![]() . (53)
. (53)
Jeśli Y b okazał się mniejszy niż 0,7, należy go przyjąć
Y b = 0,7
Naprężenia robocze wyznaczane są dla każdego biegu lub dla tego o mniejszym przełożeniu
Rzeczywista wytrzymałość na zmęczenie przy zginaniu
Wartość współczynnika bezpieczeństwa zmęczenia przy zginaniu wskazuje na stopień niezawodności w stosunku do prawdopodobieństwa złamania zęba. Im wyższy ten współczynnik, tym mniejsze prawdopodobieństwo uszkodzenia zmęczeniowego zęba.
5.4. Test wytrzymałości statycznej styku.
![]() . (56)
. (56)
Tmax=
[s] Hmaks- dopuszczalne statyczne naprężenia kontaktowe.
Dla lepszych zębów
![]() . (57)
. (57)
Te dopuszczalne naprężenia zapobiegają odkształceniom plastycznym warstw powierzchniowych zęba.
Granicę plastyczności s T można wybrać z tabeli 1.2.
Do zębów hartowanych powierzchniowo, w tym hartowanego telewizora HDTV
![]() . (58)
. (58)
Te dopuszczalne naprężenia zapobiegają pękaniu warstw powierzchniowych zęba.
5.5. Weryfikacja wytrzymałości statycznej na zginanie. Sprawdzenie odbywa się pod kątem przekładni i koła
![]() . (59)
. (59)
Dopuszczalne statyczne naprężenia zginające. Dla ulepszonych i hartowanych powierzchniowo zębów
![]() . (60)
. (60)
Sprawdzenie tych dopuszczalnych naprężeń zapobiega natychmiastowemu złamaniu zęba, gdy przekładnia jest przeciążona.
Tabela 1.1
Tabela 1.2
| Gatunek stali | Obróbka cieplna | Rozmiar przekroju, mm, nie więcej | Twardość powierzchni HB lub HRC | Wytrzymałość na rozciąganie s b , MPa | Granica plastyczności s T, MPa |
| Poprawa | HB 192...228 | ||||
| Poprawa normalizacji | HB 170...217 HB 192...217 | ||||
| Poprawa normalizacji | HB 179...228 HB 228...255 | ...800 | |||
| 40X | Ulepszenie Ulepszenie Ulepszenie | 100...300 300...500 | HB 230...280 HB 163...269 HB 163...269 | ||
| 40HN | Wzmocnij ulepszenie temperamentu | 100...300 | HB 230...300 HB„241” HRC 48...54 | ||
| 20X | Cementowanie | HRC 56...63 | |||
| 12ХН3А | Cementowanie | HRC 56...63 | |||
| 38HMYUA | Azotowanie | - | HRC 57...67 |
Notatka. Wielkość przekroju oznacza promień obrabianego przedmiotu wału przekładni lub grubość felgi.
Tabela 1.3
Tabela 1.4
| HRC | ||||||
| HB |
Tabela 1.5
Tabela 1.6
Tabela 1.8
Tabela 1.9
Tabela 1.10
| Stopień dokładności | Twardość powierzchni zęba | Typ skrzyni biegów | KHV | KFV | ||||||||
| Prędkość obwodowa V, SM | ||||||||||||
| HB 1 i HB 2 >350 | proste | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | |
| kosa | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | ||
| HB 1 lub HB 2 £350 | proste | 1,04 | 1,20 | 1.40 | 1,60 | 1,80 | 1,08 | 1,40 | 1,80 | - | - | |
| kosa | 1,02 | 1,08 | 1,16 | 1,24 | 1,32 | 1,03 | 1,16 | 1,32 | 1,48 | 1,64 | ||
| HB 1 i HB 2 >350 | proste | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | |
| kosa | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | ||
| HB 1 lub HB 2 £350 | proste | 1,05 | 1,24 | 1,48 | 1,72 | 1,96 | 1,10 | 1,48 | 1,96 | - | - | |
| kosa | 1,02 | 1,10 | 1,19 | 1,29 | 1,38 | 1,04 | 1,19 | 1,38 | 1,57 | 1,77 | ||
| HB 1 i HB 2 >350 | proste | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | |
| kosa | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | ||
| HB 1 lub HB 2 £350 | proste | 1,06 | 1,28 | 1,56 | 1,84 | - | 1,11 | 1,56 | - | - | - | |
| kosa | 1,02 | 1,11 | 1,22 | 1,34 | 1,45 | 1,04 | 1,22 | 1,45 | 1,67 | - |
Tabela 1.11
| Współczynnik KH b w HB 1 350 GBP lub HB 2 350 | ||||||||||
| Projekt transmisji | Współczynnik y d = bW/D 1 | |||||||||
| 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 | |
| Przekładnia wspornikowa na łożyskach kulkowych | 1,09 | 1,19 | 1,3 | - | - | - | - | - | - | - |
| Przekładnia wspornikowa na łożyskach wałeczkowych | 1,07 | 1,13 | 1,20 | 1,27 | - | - | - | - | - | - |
| Szybka para dwustopniowej skrzyni biegów o rozłożonym schemacie | 1,03 | 1,06 | 1,08 | 1,12 | 1,16 | 1,20 | 1,24 | 1,29 | - | - |
| Para wolnoobrotowych dwustopniowych przekładni współosiowych | 1,02 | 1,03 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,24 | 1,30 |
| Para wolnoobrotowa dwustopniowej skrzyni biegów o schemacie rozszerzonym i współosiowym | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,25 |
| Jednostopniowa przekładnia czołowa | 1,01 | 1,02 | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,14 | 1,18 |
| Para wolnoobrotowa dwustopniowej skrzyni biegów z rozstawionym stopniem wysokoobrotowym | 1,01 | 1,02 | 1,02 | 1,02 | 1,03 | 1,04 | 1,05 | 1,07 | 1,08 | 1,12 |
| Współczynnik KFb=(0,8...0,85)× KH b„1” |
Tabela 1.12
Tabela 1.14
| Współczynnik | Nazwa współczynnika | Wartość współczynnika |
| Y R | Współczynnik chropowatości spiralnej | Frezowanie i szlifowanie kół zębatych Y R=1. polerowanie Y R=1.05....1.20. Wyższe wartości w celu poprawy i utwardzenia HDTV. |
| Y X | Współczynnik wielkości (współczynnik skali) | Stal: obróbka cieplna luzem Y X=1,03 - 0,006× m; 0,85 £ Y X 1 GBP. Utwardzanie powierzchniowe, azotowanie Y X=1,05 - 0,005× m; 0,8 zł Y X 1 GBP. Żeliwo z grafitem sferoidalnym Y X=1,03 - 0,006× m; 0,85 £ Y X 1 GBP. Żeliwo szare Y X=1,075 – 0,01× m;0.7£ Y X 1 GBP. |
| Y D | Współczynnik wrażliwości materiału na koncentrację naprężeń | Y d = 1,082 - 0,172× lgm. |
| Kontynuacja tabeli 1.14 | ||
| Y A | Współczynnik odwracalności | Do nieodwracalnej pracy Y A=1. W trybie odwrotnym przy równych warunkach obciążenia w obu kierunkach: dla stali normalizowanej i hartowanej Y A= 0,65; do stali hartowanej Y A=0,75; do stali azotowanej Y A=0,9. |
Tabela 1.15
| Obróbka cieplna | Twardość powierzchni | Gatunki stali | s flim, MPa | S F z prawdopodobieństwem niezniszczenia | |
| normalna | zwiększony | ||||
| Normalizacja, poprawa | 180...350 HB | 40,45,40X, 40XN, 35XM | 1,75×( HB) | 1,7 | 2,2 |
| Hartowanie luzem | 45...55 HRC | 40H, 40HN, 40HFA | 500...550 | 1.7 | 2,2 |
| Utwardzanie HDTV | 48...52 HRC | 40X,35XM, 40XN | 500...600 | 1,7 | 2,2 |
| Utwardzanie powierzchni HDTV | 48...52 HRC | 40X,35XM, 40XN | 600...700 | 1,7 | 2,2 |
| Azotowanie | 57...67 HRC | 38HMYUA | 590...780 | 1,7 | 2,2 |
| Cementowanie | 56...63 HRC | 12ХН3А | 750...800 | 1,65...1,7 | 2...2,2 |
Tabela 1.16
| Moduł | Kąt spirali b 0 | Moduł | Kąt zęba b 0 | ||||
| m, mm | m, mm | ||||||
| Szerokość rowka C, mm | Szerokość rowka C, mm | ||||||
| 2,5 | |||||||
| 3,0 | |||||||
| 3,5 | |||||||
Wymaganą moc napędu określa wzór:
gdzie T 2 – moment na wale wyjściowym (Nm);
n 2 - częstotliwość obrotów wału wyjściowego (obr/min).
Wyznaczenie wymaganej mocy silnika elektrycznego.
Wymaganą moc silnika określa wzór

gdzie η skrzynia biegów- sprawność skrzyni biegów;
Zgodnie ze schematem kinematycznym danego napędu, sprawność skrzyni biegów określa zależność:
η skrzynia biegów = η zaręczyny η 2 namiar η złączki ,
gdzie η zaręczyny– sprawność uzębienia; zaakceptować η zaręczyny = 0,97 ;
η namiar– sprawność pary łożysk tocznych; zaakceptować η namiar = 0,99 ;
η złączki– sprawność sprzęgła; zaakceptować η złączki = 0,98 .
1.3. Wyznaczanie częstotliwości obrotów wału silnika.
Zakres prędkości, w którym można zlokalizować prędkość synchroniczną silnika elektrycznego, określamy za pomocą wzoru:
n od = tyn 2 ,
gdzie ty- przełożenie sceny; dobieramy zakres przełożeń, który jest zalecany dla jednego stopnia przekładni czołowej w zakresie od 2 do 5.
Na przykład: n od = tyn 2 = (2 - 5)200 = 400 - 1000 obr./min.
1.4. Wybór silnika.
Zgodnie z wymaganą mocą silnika elektrycznego r Cons.(jeśli się uwzględni r el.dv. ≥ r Cons.) i synchroniczna prędkość wału n od wybierz silnik elektryczny:
seria…..
moc r= ……kW
prędkość synchroniczna n od= …..rpm
prędkość asynchroniczna n 1 = …..obr/min.

Ryż. 1. Szkic silnika elektrycznego.
1.5. Określenie przełożenia skrzyni biegów.

Zgodnie z obliczoną wartością przełożenia dobieramy z szeregu przełożeń wartość standardową z uwzględnieniem błędu. Zaakceptować ty Sztuka. = ….. .
1.6. Wyznaczanie prędkości i momentów obrotowych na wałach skrzyni biegów.
Prędkość wału wejściowego n 1 = ….. obr./min.
Prędkość wału wyjściowego n 2 = ….. obr./min.
Moment obrotowy na kole wału wyjściowego:

Moment obrotowy na kole zębatym wału wejściowego:

2. OBLICZANIE BIEGÓW ZAMKNIĘTYCH.
2.1. Obliczenia projektowe.
1. Wybór materiału koła.
Na przykład:
Koło zębate
hb = 269…302 hb = 235…262
hb 1 = 285 hb 2 = 250
2. Określamy dopuszczalne styki napięciowe zębów kół zębatych i kół :

gdzie h Lim - granica wytrzymałości powierzchni styku zębów, odpowiadająca podstawowej liczbie cykli naprężeń przemiennych; określana w zależności od twardości powierzchni zęba lub ustalona wartość liczbowa;
Na przykład: h Lim = 2HB+70.
S h- współczynnik bezpieczeństwa; do kół zębatych o jednolitej strukturze materiału i twardości powierzchni zębów HB 350 zalecane S h = 1,1 ;
Z n– współczynnik trwałości; dla przekładni podczas długotrwałej pracy w trybie stałego obciążenia zaleca się Z n = 1 .
Ostatecznie dla dopuszczalnego naprężenia kontaktowego przyjmuje się mniejszą z dwóch wartości dopuszczalnych naprężeń kontaktowych koła i przekładni [ h] 2 i [ h ] 1:[ h ] = [ h ] 2 .
3. Określ odległość środka od stanu wytrzymałości kontaktowej aktywnych powierzchni zębów .

gdzie mi itp- zmniejszony moduł sprężystości materiałów kół; w przypadku felg stalowych można zaakceptować mi itp= 210 5 MPa;
ba- współczynnik szerokości koła w stosunku do odległości osi; dla kół położonych symetrycznie względem podpór zaleca się ψ ba = 0,2 – 0,4 ;
DO h jest współczynnikiem koncentracji obciążenia w obliczeniach naprężeń kontaktowych.
Aby określić współczynnik DO h konieczne jest określenie stosunku względnej szerokości koła koronowego do średnicy ψ bd : ψ bd = 0,5ψ ba (ty1)=….. .
Zgodnie z wykresem z rysunku ... .. biorąc pod uwagę położenie koła zębatego względem podpór, o twardości HB 350, zgodnie z wartością współczynnika ψ bd znaleźliśmy: DO h = ….. .
Obliczamy odległość od środka:
Na przykład:
W przypadku skrzyń biegów odległość środkowa jest zaokrąglana zgodnie z szeregiem standardowych odległości środkowych lub szeregiem Ra 40 .
Przydzielać ale W= 120 mm.
4. Określ moduł transmisji.
m = (0,01 – 0,02)ale W= (0,01 - 0,02)120 = 1,2 - 2,4 mm.
Dla liczby modułów z otrzymanego przedziału przypisujemy standardową wartość modułu: m= 2 mm.
5. Określ liczbę zębów i kół zębatych.
Łączną liczbę zębów koła zębatego i koła określa się ze wzoru: ale W = m(z 1 +z 2 )/2;
stąd z = 2ale W /m= …..; zaakceptować z = ….. .
Liczba zębów przekładni: z 1 = z /(ty1) = …..
Aby wyeliminować podcięte zęby z 1 ≥ z min ; dla ostrogi zaangażowania z min = 17 . Zaakceptować z 1 = ….. .
Liczba zębów koła: z 2 = z - z 1 = .. Zalecane z 2 100 .
6. Podajemy przełożenie.
Rzeczywiste przełożenie określamy według wzoru:

Błąd wartości rzeczywistego przełożenia od wartości obliczonej:

Warunek dokładności projektowej jest spełniony.
Za przełożenie skrzyni biegów bierzemy ty fakt = ….. .
7. Określamy główne wymiary geometryczne koła zębatego i koła.
Dla ściernic ciętych bez przesunięcia narzędzia:
średnice koła podziałowego
D W = D
kąt zaczepienia i kąt profilu
α W = α = 20º
średnice podziałowe
D 1 = z 1 m
D 2 = z 2 m
średnice wierzchołków zębów
D a1 = D 1 +2 m
D a2 = D 2 +2 m
średnice wnęki
D F 1 = D 1 –2,5 m
D F 2 = D 2 –2,5 m
wysokość zęba
h = 2,25 m
szerokość koła koronowego
b w = ψ ba ale W
szerokość kół zębatych i kół;
b 2 = b w
b 1 = b 2 + (3 - 5) = ..... . Zaakceptować b 1 = ….. mm.
sprawdź wartość odległości od środka
a w = 0,5 (D 1 + D 2 )



Popularny
- Kuter torpedowy Kuter torpedowy G 5
- Nauka i Życie (Archiwum Czasopism)
- Statusy o sobie szczęśliwym Status o szczęściu z krótkim znaczeniem VK
- Najcenniejsze marki na świecie
- Starożytne, starożytne zawody naszych przodków
- Inspirujące cytaty mistrzów fotografii Hasło dla fotografa w języku angielskim
- Gdzie wyjechać do pracy za granicą?
- Kim jest kupujący w handlu marką
- Wywiad z kupującym: tajemnice zawodu
- Jaki rodzaj edukacji odbywa się w Ministerstwie Sytuacji Nadzwyczajnych