Calcul și selecția (metodologie rusă) - cutie de viteze melcat. Viteza reală de ieșire Calculul trenului de viteze închis
Exemplul 1
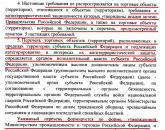
Determinați raportul de transmisie al trenului de viteze (Fig. 19), numărul de rotații ale arborelui antrenat și coeficientul general de performanță (eficiență), dacă numărul de dinți ai roților este egal: z 1 =30, z 2 =20, z 3 =45, z 4 =30, z 5 =20, z 6 =120, z 7 =25, z 8 =15 ; numărul de rotații ale arborelui de intrare n 1 =1600 rpm.
Soluţie
Mecanismul este format din patru etape: două cilindrice z 1 - z 2 , z 3 - z 4 cu angrenaj exterior, cilindric z 5 - z 6 cu angrenaj intern si conic z 7 - z 8 .
Raportul de transmisie total al unei transmisii cu mai multe trepte este egal cu produsul raporturilor de transmisie ale fiecărei trepte care formează acest mecanism de transmisie. Pentru acest caz
 .
.
Semnul (-) indică faptul că sensul de rotație al roților din aceste perechi este opus. Direcția de rotație a roților în acest caz poate fi determinată și prin plasarea săgeților pe diagramă (Fig. 19).
Numărul de rotații ale arborelui antrenat este determinat prin raportul de transmisie  rpm
rpm
Eficiența globală a mecanismului de viteză este egală cu
unde valorile numerice sunt luate în funcție de starea problemei T1.
Exemplul 2
Aici  ,
, ,
, - rapoartele de transmisie ale mecanismului convertit (suport H oprit și roata fixă se învârte z 3
). Raportul de transmisie rezultat cu semnul „+” indică coincidența direcțiilor de rotație ale arborilor de antrenare și condus.
- rapoartele de transmisie ale mecanismului convertit (suport H oprit și roata fixă se învârte z 3
). Raportul de transmisie rezultat cu semnul „+” indică coincidența direcțiilor de rotație ale arborilor de antrenare și condus.
Exemplul 3
Soluţie
Ca și în exemplul 2, acest mecanism se referă la un angrenaj planetar cu o singură treaptă și raportul de transmisie de la suport H la roată z 1 este determinată de relație
Exemplul 4
Soluţie
Un angrenaj complex constă din două trepte: prima treaptă este o pereche cilindrică simplă cu angrenaj extern z 1 -z 2, a doua treaptă este un angrenaj planetar N-z 5 , transmitând mișcarea de rotație de la purtător H la roată z 5 prin satelit z 4 . Sensul de rotație al arborelui de ieșire este determinat de un semn algebric.
1. Pentru o transmisie în două trepte, raportul total de transmisie se găsește prin rapoartele de transmisie ale fiecărei trepte, adică.
 .
.
Raport de transmisie primit  , care indică o creștere a frecvenței de rotație a arborelui de ieșire, iar semnul „+” indică faptul că direcțiile de rotație ale arborilor sunt aceleași.
, care indică o creștere a frecvenței de rotație a arborelui de ieșire, iar semnul „+” indică faptul că direcțiile de rotație ale arborilor sunt aceleași.
2. Determinați viteza unghiulară a legăturii de ieșire  și accelerația sa unghiulară
și accelerația sa unghiulară 
 rad/s,
rad/s,
 rad/s 2 .
rad/s 2 .
3. Deoarece rotația roților este accelerată (acceptăm accelerată uniform), atunci timpul în care vitezele unghiulare se vor dubla, determinăm din dependență
 ,
,
Unde  Și
Și  - viteze unghiulare, respectiv, la începutul şi la sfârşitul perioadei de timp luate în considerare
- viteze unghiulare, respectiv, la începutul şi la sfârşitul perioadei de timp luate în considerare  . De aici
. De aici
 din.
din.
4. Determinați eficiența totală a transmisiei
Sarcina T2
Legătura de ieșire a mecanismului prezentat în diagrame (Fig. 23–32) efectuează o mișcare alternativă (sau alternativă) și este încărcată pe cursa de lucru cu o forță constantă F c
(sau moment T din) rezistenţă utilă. La relanti, cu direcția inversă de mișcare a legăturii de ieșire, nu există rezistență utilă, dar cele dăunătoare continuă să acționeze. Ținând cont de efectul frecării în perechi cinematice, din punct de vedere al eficienței  mecanism de stabilit.
mecanism de stabilit.
1) moment de conducere T d , constantă în mărime, care trebuie aplicată la legătura de intrare în mișcare constantă, cu un ciclu constând din curse de lucru și în gol;
2) lucrul fortelor de frecare asupra curselor de lucru si in gol, avand in vedere ca rezistenta nociva este constanta pe fiecare dintre curse, dar la cursa de lucru este de trei ori mai mare decat la ralanti;
3) modificarea energiei cinetice a mecanismului în timpul cursei de lucru și în timpul mersului în gol;
4) puterea necesară de la unitate atunci când legătura de intrare se rotește la o viteză medie  și puterea medie (pentru o întreagă revoluție) a rezistenței utile și a forțelor de frecare.
și puterea medie (pentru o întreagă revoluție) a rezistenței utile și a forțelor de frecare.
Rezolvarea acestei probleme se bazează pe ecuația de mișcare a mecanismului, care stabilește relația dintre modificarea energiei cinetice și munca forțelor (legea energiei cinetice). Munca fortelor si momentelor este determinata, respectiv, de deplasarile liniare sau unghiulare ale verigilor asupra carora actioneaza. În acest sens, este necesar să se determine pozițiile mecanismului la pozițiile extreme ale legăturii de ieșire. Mișcările legăturilor, liniare și unghiulare, pot fi determinate dintr-un desen realizat la scară sau calculate analitic. Dimensiunile legăturilor, conform denumirilor lor de pe diagrama mecanismului, și alte valori necesare sunt date în tabelele de date numerice, unde  este factorul de eficiență, iar în opțiunea 9 m- modul cremalieră și pinion, z
- numarul de dinti ai rotii.
este factorul de eficiență, iar în opțiunea 9 m- modul cremalieră și pinion, z
- numarul de dinti ai rotii.
Tabelul 17
|
Valoare |
Penultima cifră |
|||||||||
|
OA, mm | ||||||||||
|
OS, mm | ||||||||||
|
soare, mm | ||||||||||
|
AB, mm | ||||||||||
|
T din , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 18
|
Valoare |
Penultima cifră |
|||||||||
|
oa, mm | ||||||||||
|
AB, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 19
|
Valoare |
Penultima cifră |
|||||||||
|
OA, mm | ||||||||||
|
OV, mm | ||||||||||
|
T din , Nm | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 20
|
Valoare |
Penultima cifră |
|||||||||||||||||||||
|
oa, mm | ||||||||||||||||||||||
|
OV, mm | ||||||||||||||||||||||
|
BC=BD, mm | ||||||||||||||||||||||
|
F c , H | ||||||||||||||||||||||
|
| ||||||||||||||||||||||
|
| ||||||||||||||||||||||

 , rad/s
, rad/sTabelul 21
|
Valoare |
Penultima cifră |
|||||||||
|
R, mm | ||||||||||
|
oa, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 22
|
Valoare |
Penultima cifră |
|||||||||
|
OA, mm | ||||||||||
|
OV, mm | ||||||||||
|
BD, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 ,
rad/s
,
rad/sTabelul 23
|
Valoare |
Penultima cifră |
|||||||||
|
OA, mm | ||||||||||
|
e, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 24
|
Valoare |
Penultima cifră |
|||||||||
|
R, mm | ||||||||||
|
oa, mm | ||||||||||
|
r, mm | ||||||||||
|
| ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 25
|
Valoare |
Penultima cifră |
|||||||||
|
oa, mm | ||||||||||
|
AB, mm | ||||||||||
|
m, mm | ||||||||||
|
| ||||||||||
|
T din, Nm | ||||||||||
|
| ||||||||||

 , rad/s
, rad/sTabelul 26
|
Valoare |
Penultima cifră |
|||||||||
|
oa, mm | ||||||||||
|
OV, mm | ||||||||||
|
F c , H | ||||||||||
|
| ||||||||||
|
| ||||||||||

 , rad/s
, rad/sSecvența sarcinii. În primul rând, este necesar să se construiască un mecanism în poziții extreme și în direcții date ale vitezei unghiulare a legăturii de intrare.  și forță constantă F din
(sau moment T din) rezistență utilă la setarea curselor de lucru și la ralanti.
și forță constantă F din
(sau moment T din) rezistență utilă la setarea curselor de lucru și la ralanti.
Când se determină grafic deplasările liniare și unghiulare ale legăturilor, este necesar să se elimine din desen:
1) pentru legătura de intrare, unghiurile sale de rotație pe cursa de lucru  iar la ralanti
iar la ralanti  X;
X;
2) pentru legătura de ieșire în timpul mișcării sale alternative, deplasare liniară, adică mișcare s,
sau în timpul mișcării sale de rotație alternativă, unghiul de balansare  .
.
Pentru a determina zonele de cursă de lucru și de mers în gol pentru legătura de intrare, este necesar să se țină seama de legătura mișcării cu direcția de acțiune indicată a rezistenței utile, care ar trebui să împiedice mișcarea verigii de ieșire în timpul cursei de lucru. .
În opțiunile 5 și 8, legăturile din perechea superioară sunt blocate pozitiv, împiedicând legăturile să se îndepărteze unele de altele: în opțiunea 8, rola de rază r rulează în canelura circulară a verigii de intrare, acoperită de profilele exterioare și interioare ale canelurii, în varianta 5 excentricul rotund este acoperit de cadrul verigii de ieșire.
INTRODUCERE
Angrenajul melcat se referă la roți dințate cu arbori care se intersectează.
Principalele avantaje ale angrenajelor melcate: posibilitatea de a obține rapoarte mari de transmisie într-o pereche, cuplare lină, posibilitatea de autofrânare. Dezavantaje: eficienta relativ scazuta, uzura crescuta si tendinta de gripare, necesitatea folosirii unor materiale scumpe anti-frictiune pentru roti.
Angrenajele melcate sunt mai scumpe și mai complicate decât angrenajele, așa că sunt utilizate, de regulă, atunci când este necesar să se transfere mișcarea între arbori care se intersectează și, de asemenea, acolo unde este nevoie de un raport de transmisie mare.
Criteriul de performanță al angrenajelor melcate este rezistența suprafeței dinților, care asigură rezistența acestora la uzură și absența ciobirii și gripării, precum și rezistența la încovoiere. Sub acțiunea supraîncărcărilor de scurtă durată în angrenajul melcat, dinții roții melcate sunt verificați pentru îndoire în funcție de sarcina maximă.
Pentru corpul viermelui, se efectuează un calcul de verificare a rigidității și se efectuează și un calcul termic.
Proiectarea se realizează în două etape: proiectare - din condițiile rezistenței la contact, se determină dimensiunile principale ale transmisiei și se verifică - cu parametri cunoscuți ai transmisiei în condițiile funcționării acesteia, se determină și se compară tensiunile de contact și de încovoiere. cu cele permise de rezistenţa materialului.
Se determină forțele care încarcă rulmenții, iar rulmenții sunt selectați în funcție de capacitatea lor de încărcare.
CALCUL CINEMATIC ȘI FORȚĂ
Alegerea motorului
Pentru a selecta un motor electric, se determină puterea și viteza necesară.
Conform datelor de proiectare inițiale, puterea necesară pentru a efectua procesul tehnologic poate fi găsită din formula:
P out \u003d F t V, (2.1)
unde P out - puterea pe arborele de ieșire al unității, W;
F t - forța de tracțiune, N;
V este viteza de deplasare a corpului de lucru, m/s;
P out \u003d 1,5 kW.
Determinarea randamentului global conduce
Apoi, în conformitate cu lanțul de transmisie cinematică a puterii, eficiența totală. a întregii unități se calculează prin formula:
s total = s 1 s 2 s 3 s 4 (2,2)
h total = 0,80,950,980,99 = 0,74.
Astfel, pe baza eficienței generale. a devenit clar că în timpul funcționării motorului, doar 74% din puterea motorului va merge către tamburul troliului.
Să determinăm puterea necesară a motorului pentru funcționarea normală a troliului:
Acceptăm un motor de 2,2 kW.
Calculul vitezei de rotație a arborelui motorului
Deoarece în această etapă rapoartele de transmisie ale angrenajelor de antrenare sunt încă necunoscute și turația arborelui motorului nu este cunoscută, devine posibil să se calculeze viteza dorită a arborelui motorului.
Pentru aceasta s-au efectuat următoarele calcule.
Determinarea vitezei arborelui de ieșire al motorului
Conform datelor inițiale, viteza unghiulară a arborelui de ieșire este calculată prin formula:
unde u - viteza unghiulara, s -1;
D b - diametrul tamburului, m;
v este viteza de deplasare a corpului de lucru, m/s.
Să găsim frecvența de rotație, cunoscând viteza unghiulară prin formula:
rpm (2,5)
Determinarea raportului de transmisie dorit
Din analiza diagramei cinematice a acționării troliului electric, se poate observa că raportul de transmisie total al acestuia (u total) se formează datorită raportului de transmisie al reductorului angrenajului melcat.
Se acceptă u chp = 50. Relația dintre frecvențele de rotație ale arborelui motor n dv și arborele de ieșire n z este determinată de relația:
n dv = n z u total, (2,6)
atunci viteza dorită a arborelui motorului va fi:
n motor = 38.250 = 1910 rpm.
Conform gamei curente de motoare, cel mai apropiat de turația dorită este un motor cu o turație sincronă de 1500 rpm. Având în vedere cele de mai sus, acceptăm în sfârșit motorul mărcii: 90L4 / 1395. Seria AIR, care are următoarele caracteristici:
R dv \u003d 2,2 kW;
n motor = 1500 rpm.
Calcule cinematice
Raportul de transmisie total:
u total \u003d n dv / \u003d 1500 / 38,2 \u003d 39,3.
Să determinăm toate caracteristicile cinematice ale unității proiectate, care vor fi necesare în viitor pentru un studiu detaliat al transmisiei. Determinarea frecvenței și vitezelor de rotație. Este ușor să se calculeze vitezele de rotație ale tuturor arborilor, pornind de la viteza de rotație selectată a arborelui motorului electric, ținând cont de faptul că viteza de rotație a fiecărui arbore ulterior este determinată prin viteza de rotație a celui precedent în funcție de formula (2.7), luând în considerare raportul de transmisie:
unde n (i+1) - viteza i+1 arbore, rpm;
u i -(i+1) - raportul de transmisie între arborii i și i+1.
Momente pe arborii cutiei de viteze:
T 1 \u003d 9,5510 3 (P / n e) \u003d 9,5510 3 (2,2 / 1500) \u003d 14,0 Nm
T 2 \u003d T 1 u \u003d 14.039.3 \u003d 550 Nm.
Angrenajul melcat este una dintre clasele de cutii de viteze mecanice. Cutiile de viteze sunt clasificate în funcție de tipul de transmisie mecanică. Șurubul care stă la baza angrenajului melcat arată ca un vierme, de unde și numele.
Motorreductor- aceasta este o unitate formată dintr-o cutie de viteze și un motor electric, care sunt într-o singură unitate. Motor cu angrenaj melcatcreată pentru a funcționa ca motor electromecanic în diverse mașini de uz general. Este de remarcat faptul că acest tip de echipamente funcționează perfect atât sub sarcini constante, cât și variabile.
Într-o cutie de viteze cu melc, creșterea cuplului și scăderea vitezei unghiulare a arborelui de ieșire are loc datorită conversiei energiei conținute în viteza unghiulară mare și cuplul scăzut pe arborele de intrare.
Erorile în calculul și selecția cutiei de viteze pot duce la defecțiunea prematură a acesteia și, ca urmare, în cel mai bun caz  la pierderea financiară.
la pierderea financiară.
Prin urmare, munca de calcul și selectare a cutiei de viteze trebuie să fie încredințată specialiștilor cu experiență în proiectare, care vor lua în considerare toți factorii, de la amplasarea cutiei de viteze în spațiu și condițiile de funcționare până la temperatura de încălzire a acesteia în timpul funcționării. După ce a confirmat acest lucru cu calcule adecvate, specialistul va asigura selectarea cutiei de viteze optime pentru unitatea dumneavoastră specifică.
Practica arată că o cutie de viteze selectată corespunzător asigură o durată de viață de cel puțin 7 ani pentru cutiile de viteze melcate și 10-15 ani pentru cutiile de viteze cilindrice.
Alegerea oricărei cutii de viteze se realizează în trei etape:
1. Selectarea tipului cutiei de viteze
2. Selectarea dimensiunii totale (dimensiunii) reductorului și a caracteristicilor acestuia.
3. Verificarea calculelor
1. Selectarea tipului cutiei de viteze
1.1 Date inițiale:
Schema cinematică a motorului care indică toate mecanismele conectate la cutia de viteze, dispunerea lor spațială unul față de celălalt, indicând punctele de atașare și metodele de montare ale cutiei de viteze.
1.2 Determinarea locației în spațiu a axelor arborilor cutiei de viteze.
Cutii de viteze elicoidale:
Axa arborilor de intrare și de ieșire ai cutiei de viteze sunt paralele între ele și se află într-un singur plan orizontal - o cutie de viteze orizontală.
Axa arborelui de intrare și de ieșire al cutiei de viteze sunt paralele între ele și se află într-un singur plan vertical - o cutie de viteze verticală.
Axa arborelui de intrare și de ieșire al cutiei de viteze poate fi în orice poziție spațială, în timp ce aceste axe se află pe aceeași linie dreaptă (coincid) - o cutie de viteze cilindrice sau planetară coaxială.
Cutii de viteze elicoidale conice:
Axa arborelui de intrare și de ieșire al cutiei de viteze sunt perpendiculare între ele și se află doar într-un singur plan orizontal.
Angrenaje melcate:
Axa arborilor de intrare și de ieșire ai cutiei de viteze poate fi în orice poziție spațială, în timp ce se încrucișează la un unghi de 90 de grade unul față de celălalt și nu se află în același plan - o cutie de viteze cu melc cu o singură treaptă.
Axa arborelui de intrare și de ieșire al cutiei de viteze poate fi în orice poziție spațială, în timp ce sunt paralele între ele și nu se află în același plan, sau se încrucișează la un unghi de 90 de grade una față de alta și nu se află. în același plan - o cutie de viteze în două trepte.
1.3 Determinarea metodei de montare, a poziției de montare și a opțiunii de asamblare a cutiei de viteze. 
Metoda de fixare a cutiei de viteze și poziția de montare (montarea pe fundație sau pe arborele antrenat al mecanismului de antrenare) sunt determinate în funcție de caracteristicile tehnice date în catalog pentru fiecare cutie de viteze în mod individual.
Opțiunea de asamblare se determină conform schemelor date în catalog. Schemele „Opțiuni de asamblare” sunt prezentate în secțiunea „Desemnarea cutiilor de viteze”.
1.4 În plus, la alegerea unui tip de cutie de viteze pot fi luați în considerare următorii factori
1) Nivelul de zgomot
- cel mai jos - pentru angrenaje melcate
- cel mai înalt - pentru roți dințate cilindrice și conice
2) Eficiență
- cel mai înalt - pentru cutii de viteze planetare și cu o singură treaptă
- cel mai scăzut - în vierme, în special în două etape
Angrenajele melcate sunt utilizate de preferință în funcționare intermitentă
3) Consum de material pentru aceleași valori de cuplu pe un arbore cu viteză mică
- cel mai jos - pentru planetar cu o singură etapă
4) Dimensiuni cu aceleași rapoarte de transmisie și cupluri:
- cel mai mare axial - în coaxial și planetar
- cel mai mare în direcția perpendiculară pe axele - pentru cilindric
- cel mai mic radial - spre planetar.
5) Cost relativ frec/(Nm) pentru aceleași distanțe centrale:
- cel mai înalt – în conic
- cel mai jos - în planetară
2. Selectarea dimensiunii totale (dimensiunii) reductorului și a caracteristicilor acestuia
2.1. Datele inițiale
Diagrama cinematică a acționării care conține următoarele date:
- tipul mașinii de antrenare (motor);
- cuplul necesar pe arborele de ieșire T necesar, Nxm, sau puterea sistemului de propulsie P necesară, kW;
- frecvența de rotație a arborelui de intrare al cutiei de viteze n in, rpm;
- frecvența de rotație a arborelui de ieșire al cutiei de viteze n out, rpm;
- natura sarcinii (uniformă sau neuniformă, reversibilă sau ireversibilă, prezența și amploarea supraîncărcărilor, prezența șocurilor, șocurilor, vibrațiilor);
- durata necesară de funcționare a cutiei de viteze în ore;
- munca medie zilnică în ore;
- numărul de porniri pe oră;
- durata incluziunilor cu sarcină, PV%;
- condițiile de mediu (temperatură, condiții de îndepărtare a căldurii);
- durata incluziunilor sub sarcină;
- sarcină radială în consolă aplicată în mijlocul părții de aterizare a capetelor arborelui de ieșire F în afară și a arborelui de intrare F în;
2.2. Atunci când alegeți dimensiunea cutiei de viteze, se calculează următorii parametri:
1) Raportul de transmisie
U= n in/n out (1)
Cea mai economică este funcționarea cutiei de viteze la o turație de intrare mai mică de 1500 rpm, iar pentru o funcționare mai lungă fără probleme a cutiei de viteze, se recomandă utilizarea unei viteze a arborelui de intrare mai mică de 900 rpm.
Raportul de transmisie este rotunjit în sus la cel mai apropiat număr conform tabelului 1.
Tabelul selectează tipurile de cutii de viteze care satisfac raportul de transmisie dat.
2) Cuplul calculat pe arborele de ieșire al cutiei de viteze
T calc \u003d T necesar x K dir, (2)
T necesar - cuplul necesar pe arborele de ieșire, Nxm (date inițiale sau formula 3)
K dir - coeficientul modului de operare
Cu o putere cunoscută a sistemului de propulsie:
T necesar \u003d (P necesar x U x 9550 x eficiență) / n in, (3)
P necesar - puterea sistemului de propulsie, kW
n in - frecvența de rotație a arborelui de intrare al cutiei de viteze (cu condiția ca arborele sistemului de propulsie să transmită direct rotația arborelui de intrare al cutiei de viteze fără angrenaj suplimentar), rpm
U - raportul de transmisie al cutiei de viteze, formula 1
Eficiență - eficiența cutiei de viteze
Coeficientul modului de funcționare este definit ca produsul coeficienților: 
Pentru reductoarele de viteze:
K dir \u003d K 1 x K 2 x K 3 x K PV x K roar (4)
Pentru angrenaje melcate:
K dir \u003d K 1 x K 2 x K 3 x K PV x K rev x K h (5)
K 1 - coeficientul tipului și caracteristicilor sistemului de propulsie, tabelul 2
K 2 - coeficientul duratei tabelului de lucru 3
K 3 - coeficientul numărului de porniri tabelul 4
K PV - coeficientul duratei incluziunilor tabelul 5
K rev - coeficient de reversibilitate, cu funcționare ireversibilă K rev = 1,0 cu funcționare inversă K rev = 0,75
K h - coeficient ținând cont de locația perechii de viermi în spațiu. Când viermele este situat sub roată, K h \u003d 1.0, când este situat deasupra roții, K h \u003d 1.2. Când viermele este situat pe partea laterală a roții, K h \u003d 1.1.
3) Sarcina în consolă radială calculată pe arborele de ieșire al cutiei de viteze
F out. calculat = F out x K dir, (6)
F out - sarcina radială în consolă aplicată în mijlocul părții de aterizare a capetelor arborelui de ieșire (date inițiale), N
K dir - coeficientul modului de funcționare (formula 4.5)
3. Parametrii cutiei de viteze selectate trebuie să îndeplinească următoarele condiții:
1) T nom > T calc, (7)
T nominal - cuplul nominal pe arborele de ieșire al cutiei de viteze, dat în acest catalog în specificațiile tehnice pentru fiecare cutie de viteze, Nxm
T calc - cuplul estimat pe arborele de ieșire al cutiei de viteze (formula 2), Nxm
2) F nom > F out calc (8)
F - sarcina nominală în consolă în mijlocul părții de aterizare a capetelor arborelui de ieșire al cutiei de viteze, dată în specificațiile tehnice pentru fiecare cutie de viteze, N.
F out.calc - sarcina radială în consolă calculată pe arborele de ieșire al cutiei de viteze (formula 6), N.
3) R intrare calc< Р терм х К т, (9)
R in.calc - puterea estimată a motorului electric (formula 10), kW
Termenul P - puterea termică, a cărei valoare este dată în caracteristicile tehnice ale cutiei de viteze, kW
K t - coeficientul de temperatură, ale căror valori sunt date în tabelul 6
Puterea nominală a motorului electric este determinată de:
R in.calc \u003d (T out x n out) / (9550 x eficiență), (10)
T out - cuplul estimat pe arborele de ieșire al cutiei de viteze (formula 2), Nxm
n out - viteza arborelui de ieșire al cutiei de viteze, rpm
Eficiență - eficiența cutiei de viteze,
A) Pentru cutii de viteze cilindrice:
- într-o singură etapă - 0,99
- în două etape - 0,98
- în trei etape - 0,97
- în patru etape - 0,95
B) Pentru roți dințate conice:
- într-o singură etapă - 0,98
- în două etape - 0,97
C) Pentru cutii de viteze elicoidale conice - ca produs al valorilor părților conice și cilindrice ale cutiei de viteze.
D) Pentru cutii de viteze melcate, randamentul este dat in specificatiile tehnice pentru fiecare cutie de viteze pentru fiecare raport de transmisie.

Pentru a cumpăra o cutie de viteze melcat, aflați costul cutiei de viteze, alegeți componentele potrivite și ajutați cu întrebările care apar în timpul funcționării, managerii companiei noastre vă vor ajuta.
tabelul 1
masa 2
|
Masina de frunte |
Generatoare, ascensoare, compresoare centrifuge, transportoare cu încărcare uniformă, mixere de substanțe lichide, pompe centrifuge, angrenaje, șuruburi, mecanisme de braț, suflante, ventilatoare, dispozitive de filtrare. |
Stații de tratare a apei, transportoare cu încărcare neuniformă, trolii, tamburi de cabluri, mecanisme de rulare, rotire, ridicare a macaralelor, betoniere, cuptoare, arbori de transmisie, tăietoare, concasoare, mori, utilaje pentru industria petrolului. |
Prese de poanson, vibratoare, gatere, site, compresoare cu un singur cilindru. |
Echipamente pentru producția de produse din cauciuc și materiale plastice, mașini de amestecare și echipamente pentru oțel profilat. |
|
motor electric, turbină cu abur |
||||
|
Motoare cu ardere internă cu 4, 6 cilindri, motoare hidraulice și pneumatice |
||||
|
Motoare cu ardere internă cu 1, 2, 3 cilindri |
Tabelul 3
Tabelul 4
Tabelul 5
Tabelul 6
|
răcire |
Temperatura ambiantă, C o |
Durata includerii, PV%. |
||||
|
Reductor fara străin răcire. |
||||||
|
Reductor cu spirală de răcire cu apă. |
||||||
Algoritmul #1
Calculul angrenajului închis
Angrenaj cilindric
A l g o r i t m
calcul unelte închise pinten și elicoidal
angrenaj cilindric
Termenii de referință trebuie să conțină următoarele informații:
Pornirea arborelui angrenajului .......... .P 1, kW;
Viteza vitezei ............................... n 1, rpm;
Viteza roții ............................... n 2, rpm;
(alți parametri pot fi setați, determinați de
cele anterioare);
reversibilitatea transmisiei;
Durata de viață a transmisiei .................................. t d, ani;
Rata anuala de utilizare.... K G;
Rata zilnică de utilizare... K din;
- se incarca histograma:
Paragraful 1. Pregătirea parametrilor de proiectare.
1.1. Determinarea prealabilă a raportului de transmisie
Coordonați cu valorile standard (Tabelul 1.1). Selectați cea mai apropiată valoare standard U.
Viteza reală de ieșire
RPM (2)
Abatere de la valoarea termenilor de referință
![]() (3)
(3)
1.2. Cuplu pe arborele angrenajului
1.3. Timp de transmisie
t = t g (ani)×365(zile)×24(ore)× LA g× LA s, ora. (cinci)
Punctul 2. Alegerea materialului . Determinarea tensiunilor admisibile pentru calculul de proiectare.
2.1. Alegerea materialului (Tabelul 1.2). Prezentarea ulterioară va fi în paralel: pentru un angrenaj drept - în coloana din stânga, pentru un angrenaj elicoidal - în coloana din dreapta.
În funcție de materialul selectat și duritatea suprafeței, rezistența de contact este principalul criteriu de proiectare.
2.2. Tensiuni de contact admisibile la oboseală ale angrenajului.
Calculul pentru aceste tensiuni admisibile previne ruperea prin oboseală a suprafețelor de lucru pe durata unei anumite durate de viață. t.
![]() (6)
(6)
Unde Z R- coeficient ținând cont de rugozitatea suprafeței (Tabelul 1.3).
Z V- coeficient care tine cont de viteza periferica. Pentru valori date ale vitezei arborelui, se poate presupune preliminar în ce interval se află viteza de transmisie periferică (Tabelul 1.3).
SH- factor de siguranță (Tabelul 1.3).
Z N- factor de durabilitate
![]() (7)
(7)
N HG- numărul de bază de cicluri
NGH = (HB) 3 £ 12×10 7 . (8)
Pentru un angrenaj elicoidal, dacă are HB>350, recalculați unitățile HRC in unitati HB(Tabelul 1.4).
N EL
N EL 1 = 60x n 1× t× e H. (9)
e H- factorul de echivalență, care este determinat de histograma de încărcare
 , (10)
, (10)
Unde Tmax- cel mai mare dintre momentele de lungă durată. În cazul nostru, acesta va fi momentul T, efectiv t 1 parte din timpul total de operare t; atunci q 1 =1.
T i- fiecare treaptă de încărcare ulterioară acționând în timp t i =t i × t. Prima etapă a histogramei, egală ca sarcină T vârf = q vârf × T, nu este luată în considerare la calcularea numărului de cicluri. Această sarcină cu un număr mic de cicluri are un efect de întărire a suprafeței. Este folosit pentru a testa rezistența statică.
m- gradul curbei de oboseală, egal cu 6. Astfel,
Coeficientul de echivalenţă arată că momentul T operand in timpul e H×t timp, are același efect de oboseală ca și sarcina reală corespunzătoare histogramei de încărcare în timp t.
s Hlim- limita rezistenței la contact a angrenajului când este atins numărul de bază de cicluri N HG(Tabelul 1.5).
Tensiuni de contact admisibile nominale pentru transmisie
Punctul 3. Alegerea coeficienților de proiectare.
3.1 Alegerea factorului de sarcină. Factorul de sarcină pentru calculele preliminare este selectat din interval
K H = 1,3...1,5. (16)
Dacă în angrenajul calculat angrenajele sunt situate simetric față de suporturi, K H ales mai aproape de limita inferioară. Pentru angrenaje elicoidale K H se ia mai puțin datorită netedei mai mari a funcționării și, în consecință, a sarcinii dinamice mai puține.
3.2. Alegerea factorului de lățime a angrenajului (Tabelul 1.6). Pentru transmisiile cu angrenaje se recomandă:
- pentru multietapa y a = 0,315 ... 0,4;
- pentru o singură treaptă y a = 0,4 ... 0,5;
limita superioară este selectată pentru angrenajele elicoidale;
- pentru angrenaje chevron y a = 0,630 ... 1,25.
Punctul 4. Calculul proiectării transferului.
4.1. Determinarea distanței centrale.
Pentru un angrenaj închis, dacă ambele sau cel puțin una dintre roți au o duritate mai mică de 350 de unități, calculul de proiectare se efectuează pentru rezistența la contact la oboseală pentru a preveni ruperea pe parcursul unei anumite durate de viață. t.
 , mm. (17)
, mm. (17)
Aici T 1 - moment pe arbore angrenajeîn Nm.
Coeficient numeric:
| Ka = 450; | Ka= 410. |
Distanța centrală calculată este considerată cel mai apropiat standard conform tabelului 1.7.
4.2. Selectarea unui modul normal. Pentru roți dințate HB 350 GBP pentru cel puțin o roată este recomandat să alegeți un modul normal din următorul raport
![]() . (18)
. (18)
Scrieți toate valorile standard ale modulului normal (Tabelul 1.8) incluse în intervalul (18) .
Ca o primă aproximare, ar trebui să ne străduim să selectați modulul minim, totuși, pentru transmisiile de putere, un modul mai mic de 1,25 mm nu este recomandat. Atunci când alegeți un modul pentru o roată dințată, pentru a evita modificarea angrenajului, este necesar ca numărul total de dinți
s-a dovedit a fi un număr întreg. Apoi
Dacă un număr fracționar este rotunjit la un număr întreg, iar numărul de dinți ai roții
4.3. Pentru transmisia elicoidale a numărului de dinți
Numărul de dinți trebuie rotunjit la cel mai apropiat număr întreg.
4.5. Diametrele pasului
Calculați diametrele până la a treia zecimală.
Efectuați o verificare
Pentru transmisia nemodificată și modificarea la altitudine mare trebuie să fie precisă cu trei zecimale.
4.6. Diametrele urechilor
4.7. Diametrele cavitatii
 (26)
(26)
4.8. Lățimea estimată a roții
Într-o treaptă divizată, lățimea fiecărei roți a perechii divizate este
În treapta de viteză chevron lățimea completă a roții
Unde C- lăţimea canelurii din mijloc pentru ieşirea sculei, este selectată din tabelul 1.16. Diametrul canelurii este mai mic decât diametrul cavității cu 0,5× m.
4.9. Gradul final de suprapunere
![]() . (31)
. (31)
4.10. Viteza periferică
Dacă viteza diferă de cea adoptată provizoriu la punctul 2.2 la determinarea coeficientului K V, ar trebui să reveniți la clauza 2.2 și să clarificați tensiunile admisibile.
În funcție de viteza circumferențială, selectați gradul de precizie a transmisiei (Tabelul 1.9). Pentru angrenajele de inginerie generală la viteze de cel mult 6 m/s pentru roți dințate drepte și nu mai mult de 10 m/s pentru roți dințate elicoidale, este selectat al 8-lea grad de precizie. Angrenajul elicoidal poate fi prelucrat la gradul 7 de precizie, iar după întărirea suprafeței HDTV, deformațiile rezultate vor transfera parametrii angrenajului la gradul 8 de precizie.
Punctul 5. Verificați calculele.
5.1. Pentru calculele de verificare atât pentru rezistența la contact, cât și pentru rezistența la încovoiere, determinăm factorii de sarcină.
![]() . (33)
. (33)
![]() . (34)
. (34)
KHVȘi KFV- coeficienţii sarcinii dinamice interne. Acestea sunt selectate din tabelul 1.10. Dacă valoarea vitezei se încadrează în intervalele intervalului, coeficientul este calculat prin interpolare.
KH bȘi KFb- coeficienții de concentrare a sarcinii (distribuția neuniformă a sarcinii pe lungimea liniilor de contact). Valorile lor sunt selectate din Tabelul 1.11 prin interpolare.
K H aȘi K F a- coeficienții de distribuție a sarcinii între dinți. Selectat din tabelul 1.12 prin interpolare.
5.2. Testarea tensiunii de contact
![]() . (35)
. (35)
Z E - coeficientul materialului. Pentru oțel
Z E = 190.
Z e - coeficient de luare în considerare a lungimii totale a liniilor de contact
| Pinteni; (36) | Elicoidal; (37) |
Z H este factorul de formă al suprafețelor de împerechere. Selectat din tabelul 1.13 prin interpolare.
F t- forta circumferentiala
Deviere
![]() . (39)
. (39)
Semnul (+) indică subîncărcare, semnul (-) indică suprasarcină.
RECOMANDĂRI
Atât subîncărcarea, cât și suprasarcina nu sunt permise mai mult de 5%.
Dacă Ds H depășește ±20%, apoi pentru cutia de viteze cu parametri standard, distanța dintre centru ar trebui modificată un Wși reveniți la punctul 4.2.
Dacă Ds H depășește ±12%:
În caz de subsarcină - reduceți y a și reveniți la punctul 4.8.
În caz de suprasarcină - creșteți y a , nedepășind valorile recomandate pentru acest tip de transmisie și reveniți la punctul 4.8. Puteți modifica duritatea suprafeței dintelui în limitele recomandate și puteți reveni la pasul 2.
Dacă Ds H va fi mai mică de 12%, este posibilă corectarea tensiunilor admisibile prin tratament termic și revenirea la punctul 2.
5.3. Test de oboseală la încovoiere.
5.3.1. Tensiuni de încovoiere admise
![]() . (40)
. (40)
Testarea împotriva acestor tensiuni previne fisurarea de oboseală la rădăcina dintelui pe durata unei anumite durate de viață. tși, în consecință, carii dentare.
Y R- coeficientul de rugozitate al curbei de tranziție (Tabelul 1.14).
Y X- factorul de scară (Tabelul 1.14).
Y d este coeficientul de sensibilitate al materialului la concentrarea tensiunilor (Tabelul 1.14).
Y A- factorul de reversibilitate a sarcinii (Tabelul 1.14).
Y N- coeficient de durabilitate. Se calculează separat pentru angrenaj și roată
N FG- numărul de bază de cicluri. Pentru dinți de oțel
N FG= 4×10 6 . (42)
m- curba gradului de oboseală. În formulele anterioare și ulterioare pentru calcularea rezistenței la încovoiere la oboseală:
Pentru oteluri calite
pentru oteluri calite
NFE 1 - număr echivalent de cicluri de viteză
NFE 1 = 60x n 1× t× eF. (43)
eF- raportul de echivalenţă
 . (44)
. (44)
În conformitate cu histograma de încărcare, ca în calculul rezistenței de contact,
Număr echivalent de cicluri de roată
S F ands flim- factorul de siguranță și limita de rezistență a dintelui sunt selectate din tabelul 1.15.
5.3.2. Tensiunile de lucru ale unei coturi. Determinat separat pentru angrenaj și roată
![]() . (47)
. (47)
YFS- factorul de forma a dintelui
![]() . (48)
. (48)
X- factor de schimbare a sculei.
Z V- numar echivalent de dinti
Y e - coeficient ținând cont de suprapunerea dinților în plasă
Y b - coeficientul unghiului de înclinare al dintelui
![]() . (53)
. (53)
Dacă Y b s-a dovedit a fi mai mic de 0,7, ar trebui luat
Y b = 0,7
Tensiunile de lucru sunt determinate pentru fiecare angrenaj sau pentru cel cu raportul mai mic
Rezistența reală la oboseală la încovoiere
Valoarea factorului de siguranță la oboseală la încovoiere indică gradul de fiabilitate în raport cu probabilitatea ruperii dintelui. Cu cât acest coeficient este mai mare, cu atât este mai mică probabilitatea de eșec la oboseala dentară.
5.4. Testarea rezistenței statice de contact.
![]() . (56)
. (56)
Tmax=
[s] Hmax- tensiuni de contact statice admisibile.
Pentru dinți îmbunătățiți
![]() . (57)
. (57)
Aceste tensiuni admisibile previn deformarea plastică a straturilor de suprafață ale dintelui.
Limita de curgere s T poate fi selectată din tabelul 1.2.
Pentru dinți întăriți la suprafață, inclusiv HDTV întăriți
![]() . (58)
. (58)
Aceste tensiuni admisibile previn fisurarea straturilor superficiale ale dintelui.
5.5. Verificarea rezistenței statice la încovoiere. Se face verificarea pentru angrenaj și roată
![]() . (59)
. (59)
Tensiuni statice de încovoiere admise. Pentru dinți îmbunătățiți și întăriți la suprafață
![]() . (60)
. (60)
Verificarea acestor tensiuni admisibile previne ruperea instantanee a dinților atunci când angrenajul este supraîncărcat.
Tabelul 1.1
Tabelul 1.2
| Clasa de oțel | Tratament termic | Dimensiunea secțiunii, mm, nu mai mult | Duritatea suprafeței HB sau HRC | Rezistența la tracțiune s b , MPa | Limita de curgere s T, MPa |
| Îmbunătăţire | HB 192...228 | ||||
| Îmbunătățirea normalizării | HB 170...217 HB 192...217 | ||||
| Îmbunătățirea normalizării | HB 179...228 HB 228...255 | ...800 | |||
| 40X | Îmbunătățire Îmbunătățire Îmbunătățire | 100...300 300...500 | HB 230...280 HB 163...269 HB 163...269 | ||
| 40HN | Îmbunătățește temperatură | 100...300 | HB 230...300 HB³241 HRC 48...54 | ||
| 20X | Cimentare | HRC 56...63 | |||
| 12ХН3А | Cimentare | HRC 56...63 | |||
| 38HMYUA | Nitrurare | - | HRC 57...67 |
Notă. Mărimea secțiunii înseamnă raza piesei de prelucrat a arborelui angrenajului sau grosimea jantei roții.
Tabelul 1.3
Tabelul 1.4
| HRC | ||||||
| HB |
Tabelul 1.5
Tabelul 1.6
Tabelul 1.8
Tabelul 1.9
Tabelul 1.10
| Grad de acuratețe | Duritatea suprafeței dintelui | Tip transmisie | KHV | KFV | ||||||||
| Viteza periferică V, Domnișoară | ||||||||||||
| HB 1 şi HB 2 >350 | Drept | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | 1,02 | 1,12 | 1,25 | 1,37 | 1,5 | |
| coasă | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | 1,01 | 1,05 | 1,10 | 1,15 | 1,20 | ||
| HB 1 sau HB 2 350 GBP | Drept | 1,04 | 1,20 | 1.40 | 1,60 | 1,80 | 1,08 | 1,40 | 1,80 | - | - | |
| coasă | 1,02 | 1,08 | 1,16 | 1,24 | 1,32 | 1,03 | 1,16 | 1,32 | 1,48 | 1,64 | ||
| HB 1 şi HB 2 >350 | Drept | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | 1,03 | 1,15 | 1,30 | 1,45 | 1,60 | |
| coasă | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | 1,01 | 1,06 | 1,12 | 1,18 | 1,24 | ||
| HB 1 sau HB 2 350 GBP | Drept | 1,05 | 1,24 | 1,48 | 1,72 | 1,96 | 1,10 | 1,48 | 1,96 | - | - | |
| coasă | 1,02 | 1,10 | 1,19 | 1,29 | 1,38 | 1,04 | 1,19 | 1,38 | 1,57 | 1,77 | ||
| HB 1 şi HB 2 >350 | Drept | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | 1,03 | 1,17 | 1,35 | 1,52 | 1,70 | |
| coasă | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | 1,01 | 1,07 | 1,14 | 1,21 | 1,28 | ||
| HB 1 sau HB 2 350 GBP | Drept | 1,06 | 1,28 | 1,56 | 1,84 | - | 1,11 | 1,56 | - | - | - | |
| coasă | 1,02 | 1,11 | 1,22 | 1,34 | 1,45 | 1,04 | 1,22 | 1,45 | 1,67 | - |
Tabelul 1.11
| Coeficient KH b la HB 1 350 GBP sau HB 2 350 GBP | ||||||||||
| Proiectarea transmisiei | Coeficientul y d = bW/d 1 | |||||||||
| 0,2 | 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | 1,8 | 2,0 | |
| Angrenaj cantilever pe rulmenți cu bile | 1,09 | 1,19 | 1,3 | - | - | - | - | - | - | - |
| Angrenaj cantilever pe rulmenți cu role | 1,07 | 1,13 | 1,20 | 1,27 | - | - | - | - | - | - |
| Pereche de viteză mare a unei cutii de viteze în două trepte cu o schemă desfășurată | 1,03 | 1,06 | 1,08 | 1,12 | 1,16 | 1,20 | 1,24 | 1,29 | - | - |
| Pereche de viteze coaxiale cu două trepte de viteză redusă | 1,02 | 1,03 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,24 | 1,30 |
| Pereche de viteză mică a unei cutii de viteze în două trepte cu o schemă extinsă și coaxială | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,13 | 1,16 | 1,19 | 1,25 |
| Cutie de viteze cu o singură treaptă | 1,01 | 1,02 | 1,02 | 1,03 | 1,04 | 1,06 | 1,08 | 1,10 | 1,14 | 1,18 |
| Pereche de viteză mică a unei cutii de viteze în două trepte cu o treaptă de mare viteză distanțată | 1,01 | 1,02 | 1,02 | 1,02 | 1,03 | 1,04 | 1,05 | 1,07 | 1,08 | 1,12 |
| Coeficient KFb=(0,8...0,85)× KH b³1 |
Tabelul 1.12
Tabelul 1.14
| Coeficient | Denumirea coeficientului | Valoarea coeficientului |
| Y R | Coeficientul de rugozitate în spirală | Frezarea si slefuirea angrenajului Y R=1. Lustruire Y R=1,05...1,20. Valori mai mari pentru îmbunătățirea și întărirea HDTV. |
| Y X | factor de dimensiune (factor de scară) | Oțel: tratament termic în vrac Y X=1,03 - 0,006× m; 0,85 GBP Y X£1. Întărirea suprafeței, nitrurare Y X=1,05 - 0,005× m; 0,8 GBP Y X£1. Fontă cu grafit sferoidal Y X=1,03 - 0,006× m; 0,85 GBP Y X£1. Fontă cenușie Y X=1,075 - 0,01× m;0,7£ Y X£1. |
| Y d | Coeficient de sensibilitate a materialului la concentrarea tensiunilor | Y d = 1,082 - 0,172× lgm. |
| Continuarea tabelului 1.14 | ||
| Y A | Factorul de reversibilitate | Pentru funcționare ireversibilă Y A=1. În funcționare inversă cu condiții de încărcare egale în ambele direcții: pentru oțel normalizat și revenit Y A= 0,65; pentru oțel călit Y A= 0,75; pentru oțel nitrurat Y A=0,9. |
Tabelul 1.15
| Tratament termic | Duritatea suprafeței | Clase de oțel | s flim, MPa | S F cu probabilitatea de nedistrugere | |
| normal | a crescut | ||||
| Normalizare, îmbunătățire | 180...350 HB | 40,45,40X, 40XN, 35XM | 1,75×( HB) | 1,7 | 2,2 |
| Întărire în vrac | 45...55 HRC | 40H, 40HN, 40HFA | 500...550 | 1.7 | 2,2 |
| HDTV se întărește | 48...52 HRC | 40X, 35XM, 40XN | 500...600 | 1,7 | 2,2 |
| Întărirea suprafeței HDTV | 48...52 HRC | 40X, 35XM, 40XN | 600...700 | 1,7 | 2,2 |
| Nitrurare | 57...67 HRC | 38HMYUA | 590...780 | 1,7 | 2,2 |
| Cimentare | 56...63 HRC | 12ХН3А | 750...800 | 1,65...1,7 | 2...2,2 |
Tabelul 1.16
| Modul | Unghiul helixului b 0 | Modul | Unghiul dintelui b 0 | ||||
| m, mm | m, mm | ||||||
| Lățimea canelurii C, mm | Lățimea canelurii C, mm | ||||||
| 2,5 | |||||||
| 3,0 | |||||||
| 3,5 | |||||||
Puterea de antrenare necesară este determinată de formula:
Unde T 2 – momentul pe arborele de ieșire (Nm);
n 2 - frecventa de rotatie a arborelui de iesire (rpm).
Determinarea puterii necesare a motorului electric.
Puterea necesară a motorului este determinată de formulă

Unde η cutie de viteze- eficienta cutiei de viteze;
Conform schemei cinematice a unei anumite unități, eficiența cutiei de viteze este determinată de dependența:
η cutie de viteze = η logodnă η 2 rulmenti η cuplaje ,
Unde η logodnă– randamentul angrenajului; Accept η logodnă = 0,97 ;
η rulmenti– randamentul unei perechi de rulmenti; Accept η rulmenti = 0,99 ;
η cuplaje– randamentul ambreiajului; Accept η cuplaje = 0,98 .
1.3. Determinarea frecvenței de rotație a arborelui motorului.
Determinăm domeniul de viteză în care viteza sincronă a motorului electric poate fi localizată prin formula:
n din = un 2 ,
Unde u- raportul de transmisie al etapei; selectăm gama de rapoarte de transmisie, care este recomandată pentru o treaptă a unui angrenaj drept în intervalul 2 - 5.
De exemplu: n din = un 2 = (2 - 5)200 = 400 - 1000 rpm.
1.4. Alegerea motorului.
În funcție de puterea necesară a motorului electric R contra.(dat fiind R el.dv. ≥ R contra.) și viteza arborelui sincron n din alege un motor electric:
serie…..
putere R= ……kW
viteza sincrona n din= …..rpm
viteza asincronă n 1 = …..r/min.

Orez. 1. Schița motorului electric.
1.5. Determinarea raportului de transmisie al cutiei de viteze.

În funcție de valoarea calculată a raportului de transmisie, selectăm valoarea standard, ținând cont de eroare, dintr-o serie de rapoarte de transmisie. Accept u Artă. = ….. .
1.6. Determinare, viteze și cupluri pe arborii cutiei de viteze.
Viteza arborelui de intrare n 1 = ….. rpm.
Viteza arborelui de iesire n 2 = ….. rpm.
Cuplu pe roata arborelui de ieșire:

Cuplu pe angrenajul arborelui de intrare:

2. CALCULUL UNUI VELOZ ÎNCHIS.
2.1. Calcul de proiectare.
1. Alegerea materialului roții.
De exemplu:
Roată dințată
HB = 269…302 HB = 235…262
HB 1 = 285 HB 2 = 250
2. Determinăm contactele de tensiune admisibile pentru dinții și roțile angrenajului :

Unde H lim - limita de anduranță a suprafeței de contact a dinților, corespunzătoare numărului de bază de cicluri de tensiuni alternante; determinată în funcție de duritatea suprafeței dintelui sau se stabilește o valoare numerică;
De exemplu: H lim = 2HB+70.
S H- factor de securitate; pentru roți dințate cu structură uniformă a materialului și duritatea suprafeței dintelui HB 350 recomandat S H = 1,1 ;
Z N– coeficient de durabilitate; pentru angrenaje în timpul funcționării pe termen lung cu un mod de sarcină constantă, se recomandă Z N = 1 .
În cele din urmă, pentru solicitarea de contact admisibilă, se ia cea mai mică dintre cele două valori ale tensiunilor de contact admisibile ale roții și angrenajului [ H] 2 și [ H ] 1:[ H ] = [ H ] 2 .
3. Determinați distanța dintre centrele de la starea rezistenței la contact a suprafețelor active ale dinților .

Unde E etc- modulul de elasticitate redus al materialelor roții; pentru roți de oțel pot fi acceptate E etc= 210 5 MPa;
ba- coeficientul lățimii roții raportat la distanța pe centru; pentru rotile amplasate simetric fata de suporturi se recomanda ψ ba = 0,2 – 0,4 ;
LA H este factorul de concentrare a sarcinii în calculele pentru tensiunile de contact.
Pentru a determina coeficientul LA H este necesar să se determine raportul dintre lățimea relativă a inelului în raport cu diametrul ψ bd : ψ bd = 0,5ψ ba (u1)=….. .
Conform graficului figurii ... .. tinand cont de amplasarea angrenajului fata de suporturi, cu duritatea HB 350, după valoarea coeficientului ψ bd găsim: LA H = ….. .
Calculăm distanța dintre centru:
De exemplu:
Pentru cutii de viteze, distanța dintre centrele este rotunjită în funcție de o serie de distanțe centrale standard sau de o serie Ra 40 .
Atribui dar W= 120 mm.
4. Determinați modulul de transmisie.
m = (0,01 – 0,02)dar W= (0,01 - 0,02)120 = 1,2 - 2,4 mm.
Pentru un număr de module din intervalul obținut, atribuim valoarea standard a modulului: m= 2 mm.
5. Determinați numărul de dinți și roți ale angrenajului.
Numărul total de dinți ai angrenajului și roții este determinat din formula: dar W = m(z 1 +z 2 )/2;
de aici z = 2dar W /m= …..; Accept z = ….. .
Număr de dinți angrenaj: z 1 = z /(u1) = …..
Pentru a elimina dinții tăiați z 1 ≥ z min ; pentru angajarea pintenilor z min = 17 . Accept z 1 = ….. .
Numărul dinților roții: z 2 = z - z 1 = .. Recomandat z 2 100 .
6. Precizăm raportul de transmisie.
Determinăm raportul real de transmisie prin formula:

Eroarea în valoarea raportului de transmisie real din valoarea calculată:

Condiția de precizie a proiectării este îndeplinită.
Pentru raportul de transmisie al cutiei de viteze, luăm u fapt = ….. .
7. Determinăm principalele dimensiuni geometrice ale angrenajului și roții.
Pentru roți tăiate fără compensare a sculei:
diametrele cercului de pas
d W = d
unghiul de angajare și unghiul profilului
α W = α = 20º
diametre de pas
d 1 = z 1 m
d 2 = z 2 m
diametrele vârfului dintelui
d a1 = d 1 +2 m
d a2 = d 2 +2 m
diametrele cavitatii
d f 1 = d 1 –2,5 m
d f 2 = d 2 –2,5 m
înălțimea dintelui
h = 2,25 m
lățimea inelului
b w = ψ ba dar W
lățimea angrenajului și a inelului roții
b 2 = b w
b 1 = b 2 + (3 - 5) = ..... . Accept b 1 = ….. mm.
verificați valoarea distanței centrale
A w = 0,5 (d 1 + d 2 )



Popular
- Barca torpiloare G 5 torpiloare
- Știință și viață (Arhiva Jurnalului)
- Statuturi despre tine fericit Statut despre fericire cu sens scurt VK
- Cele mai valoroase mărci din lume
- Profesii străvechi, străvechi ale strămoșilor noștri
- Citate inspirate de la maeștrii fotografiei Slogan pentru un fotograf în limba engleză
- Unde să mergi la muncă în străinătate?
- Ce este un cumpărător în comerțul cu mărci
- Interviu cu un cumpărător: secretele profesiei
- Ce fel de educație se face în Ministerul Situațiilor de Urgență